7. F: Wie richtet man die Open-Source-Flugsteuerung ein, um das Problem der Rollachsenneigung des Kardangelenks zu lösen, wenn sich der Starrflügel zu schnell dreht?
Antwort:
Verbinden Sie den seriellen Anschluss des Gimbals mit einem TELEM einer Open-Source-Flugsteuerung (z. B. Pixhawk), um die Horizontdrift während hochdynamischer Flüge auszugleichen.
FC TELEM-Portparametereinstellungen: Baudrate 115200, MAvlink1.
Stellen Sie die Parameter im ArduPilot ein:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Wobei „x“ die Portnummer ist. Der Wert ist 1 (Mavlink).
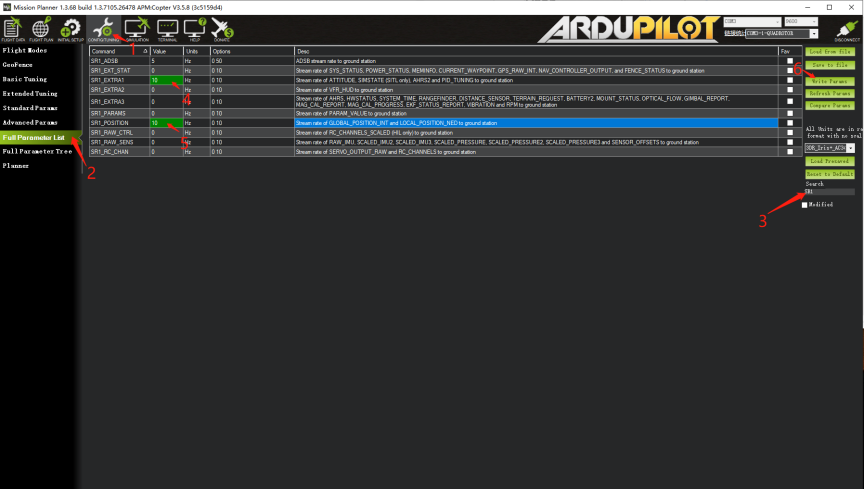
Legen Sie außerdem die folgenden Nachrichtenraten für diesen Port fest:
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
Hinweis: Alle anderen SRx_xx-Parameter sollten auf 0 gesetzt werden, um zu verhindern, dass unnötige Daten den Kanal überlasten.