
























Produkteinführung
Spezifikation
AT9-50 Spezifikation
| Hardwareparameter | |
| Betriebspannung | 16 V |
| Eingangsspannung | 4S ~ 6S (14,8 V ~ 25,2 V) |
| Ausgangsspannung | 5V (mit PWM verbinden) |
| Dynamischer Strom | 500~1000 mA bei 16 V |
| Stromverbrauch | Durchschnittlich 8 W, Max. 16 W |
| Arbeitsumgebungstemperatur. | -20℃ ~ +50℃ |
| Ausgabe | Micro-HDMI (1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Lokaler Speicher | TF-Karte (bis zu 256 G, Klasse 10, FAT32-Format) |
| Bildspeicherformat auf der TF-Karte | Bild: JPG (1920*1080) |
| Videospeicherformat in TF-Karte | MP4 (1080P 30 Bilder/s) |
| Kontrollmethode | PWM / TTL / S.BUS / TCP / UDP |
| Gimbal-Spezifikationen | |
| Mechanischer Bereich | Nicken/Neigen: -110° (nach oben)~130° (nach unten), Rollen: ±40°, Gieren/Schwenken: ±300° / ±360°*N (IP-Ausgangsversion) |
| Kontrollierbarer Bereich | Nicken/Neigen: -45°~125°, Gieren/Schwenken: ±290° / ±360°*N (IP-Ausgangsversion) |
| Schwingungswinkel | Nicken/Rollen/Gieren: ±0,02° |
| Eine Taste zur Mitte | √ |
| IR-Wärmebildkamera 1 Spezifikation | |
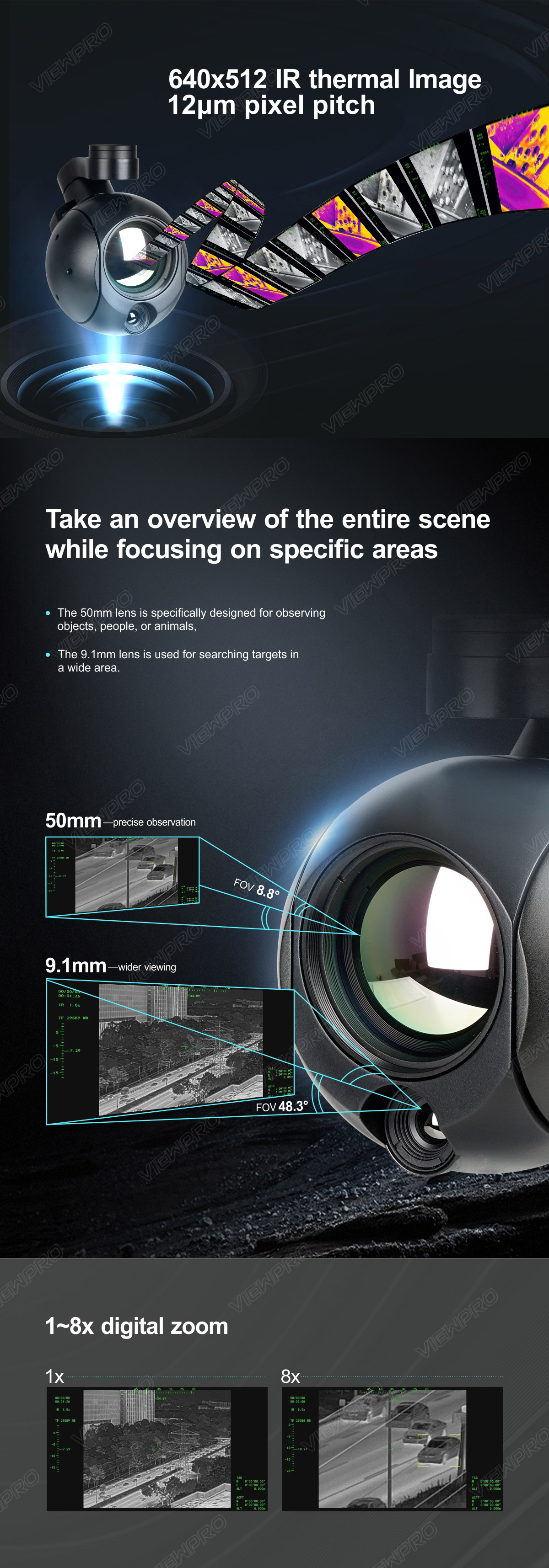
| Fokuslänge | 50 mm |
| Öffnung | F1.0 |
| Horizontales Sichtfeld | 8,7° |
| Vertikales Sichtfeld | 7,0° |
| Detektivdistanz (Mann: 1,8 x 0,5 m) | 2083 Meter |
| Distanz erkennen (Mann: 1,8x0,5m) | 521 Meter |
| Verifizierte Distanz (Mann: 1,8 x 0,5 m) | 260 Meter |
| Detektiv-Entfernung (Auto: 4,2 x 1,8 m) | 6389 Meter |
| Entfernung erkennen (Auto: 4,2x1,8m) | 1597 Meter |
| Verifizierte Entfernung (Auto: 4,2 x 1,8 m) | 799 Meter |
| Arbeitsweise | Ungekühlte VOx-Wärmebildkamera mit langer Welle (8 μm – 14 μm) |
| Detektorpixel | 640*512 |
| Pixelabstand | 12 μm |
| Fokussierungsmethode | Athermisches Festbrennweitenobjektiv |
| NETD | ≤50 mK bei F1,0 bei 25 °C |
| Farbpalette | Weiß heiß, schwarz heiß, Pseudofarbe |
| Digitaler Zoom | 1x bis 8x |
| IR-Wärmebildkamera 2 – Spezifikation | |
| Fokuslänge | 9,1 mm |
| Öffnung | F1.0 |
| Horizontales Sichtfeld | 48,3° |
| Vertikales Sichtfeld | 38,6° |
| Detektivdistanz (Mann: 1,8 x 0,5 m) | 379 Meter |
| Distanz erkennen (Mann: 1,8x0,5m) | 95 Meter |
| Verifizierte Distanz (Mann: 1,8 x 0,5 m) | 47 Meter |
| Detektiv-Entfernung (Auto: 4,2 x 1,8 m) | 1163 Meter |
| Entfernung erkennen (Auto: 4,2x1,8m) | 291 Meter |
| Verifizierte Entfernung (Auto: 4,2 x 1,8 m) | 145 Meter |
| Arbeitsweise | Ungekühlte VOx-Wärmebildkamera mit langer Welle (8 μm – 14 μm) |
| Detektorpixel | 640*512 |
| Pixelgröße | 12 μm |
| Fokussierungsmethode | Athermisches Festbrennweitenobjektiv |
| NETD | ≤40 mK bei F1,0 bei 25 °C |
| Farbpalette | Weiß heiß, schwarz heiß, Pseudofarbe |
| IR-Kamera-Objektverfolgung | |
| Aktualisierungsrate des Abweichungspixels | 30 Hz |
| Ausgabeverzögerung des Abweichungspixels | <30 ms |
| Minimaler Objektkontrast | 5 % |
| SNR | 4 |
| Minimale Objektgröße | 16*16 Pixel |
| Maximale Objektgröße | 256*256 Pixel |
| Tracking-Geschwindigkeit | ±48 Pixel/Frame |
| Objektspeicherzeit | 100 Bilder |
| IR-Kamera-KI-Leistung | |
| Zieltyp | Auto und Mensch |
| Gleichzeitige Erfassungsmenge | ≥ 10 Ziele |
| Minimales Kontrastverhältnis | 5 % |
| Minimale Zielgröße | 5×5 Pixel |
| Autoerkennungsrate | ≥85 % |
| Falschalarmrate | ≤10 % |
| Merkmale | |
| OSD | Anzeige des Gier- und Nickwinkels des Gimbals, der Vergrößerung, der Aufzeichnungsdauer der Karte, des GPS und der Flughöhe des Flugzeugs, des Datums und der Uhrzeit |
| Geotagging | Zeit und GPS-Koordinaten im Bild-Exif anzeigen |
| Kartenlegen online | HTTP-Lesebilder oder -Videos |
| KLV (UDP) | Kartenaufzeichnung oder Viewlink-Videowiedergabe |
| ArduPilot / PX4 | Unterstützung (Mavlink-Protokoll) Optional: Unterstützung der Ardupilot-Follow-me-Funktion |
| Video-Stitching | IR1+IR2 / IR2+IR1 / IR1 / IR2 |
| Dualer Videostream-Ausgang (optional) | Unterstützt (IR1 und IR2 mit zwei Stream-Ausgängen, Hinweise: Sobald der duale Video-Stream-Ausgang aktiviert ist, ist keine Aufnahme mehr möglich) |
| Verpackungsinformationen | |
| NW | 720±10g (Viewport-Version mit Viewport) |
| Produktmaße | 114,5*105*171,8 mm / 114,5*105*180,8 mm (Viewport-Version mit Viewport) |
| Zubehör | 1 Stück Gimbal-Kameragerät, Schrauben, Aluminiumzylinder, Dämpfungskugeln, Dämpfungsplatten, 1 Stück USB-zu-TTL-Kabel / Hochwertige Kunststoffbox mit Schaumstoffpolster |
| GW | Schweins-Schinken ca. 1820g |
| Paketmaße | 300 x 250 x 200 mm |
Weitere Einzelheiten finden Sie unter AT9-50 Dual IR 5x Thermal Zoom FOV Flexibility Gimbal Camera
Produkteinführung
Spezifikation
AT9-50 Spezifikation
| Hardwareparameter | |
| Betriebspannung | 16 V |
| Eingangsspannung | 4S ~ 6S (14,8 V ~ 25,2 V) |
| Ausgangsspannung | 5V (mit PWM verbinden) |
| Dynamischer Strom | 500~1000 mA bei 16 V |
| Stromverbrauch | Durchschnittlich 8 W, Max. 16 W |
| Arbeitsumgebungstemperatur. | -20℃ ~ +50℃ |
| Ausgabe | Micro-HDMI (1080P 30fps/60fps) / IP (RTSP/UDP 720p/1080p 30fps H264/H265) |
| Lokaler Speicher | TF-Karte (bis zu 256 G, Klasse 10, FAT32-Format) |
| Bildspeicherformat auf der TF-Karte | Bild: JPG (1920*1080) |
| Videospeicherformat in TF-Karte | MP4 (1080P 30 Bilder/s) |
| Kontrollmethode | PWM / TTL / S.BUS / TCP / UDP |
| Gimbal-Spezifikationen | |
| Mechanischer Bereich | Nicken/Neigen: -110° (nach oben)~130° (nach unten), Rollen: ±40°, Gieren/Schwenken: ±300° / ±360°*N (IP-Ausgangsversion) |
| Kontrollierbarer Bereich | Nicken/Neigen: -45°~125°, Gieren/Schwenken: ±290° / ±360°*N (IP-Ausgangsversion) |
| Schwingungswinkel | Nicken/Rollen/Gieren: ±0,02° |
| Eine Taste zur Mitte | √ |
| IR-Wärmebildkamera 1 Spezifikation | |
| Fokuslänge | 50 mm |
| Öffnung | F1.0 |
| Horizontales Sichtfeld | 8,7° |
| Vertikales Sichtfeld | 7,0° |
| Detektivdistanz (Mann: 1,8 x 0,5 m) | 2083 Meter |
| Distanz erkennen (Mann: 1,8x0,5m) | 521 Meter |
| Verifizierte Distanz (Mann: 1,8 x 0,5 m) | 260 Meter |
| Detektiv-Entfernung (Auto: 4,2 x 1,8 m) | 6389 Meter |
| Entfernung erkennen (Auto: 4,2x1,8m) | 1597 Meter |
| Verifizierte Entfernung (Auto: 4,2 x 1,8 m) | 799 Meter |
| Arbeitsweise | Ungekühlte VOx-Wärmebildkamera mit langer Welle (8 μm – 14 μm) |
| Detektorpixel | 640*512 |
| Pixelabstand | 12 μm |
| Fokussierungsmethode | Athermisches Festbrennweitenobjektiv |
| NETD | ≤50 mK bei F1,0 bei 25 °C |
| Farbpalette | Weiß heiß, schwarz heiß, Pseudofarbe |
| Digitaler Zoom | 1x bis 8x |
| IR-Wärmebildkamera 2 – Spezifikation | |
| Fokuslänge | 9,1 mm |
| Öffnung | F1.0 |
| Horizontales Sichtfeld | 48,3° |
| Vertikales Sichtfeld | 38,6° |
| Detektivdistanz (Mann: 1,8 x 0,5 m) | 379 Meter |
| Distanz erkennen (Mann: 1,8x0,5m) | 95 Meter |
| Verifizierte Distanz (Mann: 1,8 x 0,5 m) | 47 Meter |
| Detektiv-Entfernung (Auto: 4,2 x 1,8 m) | 1163 Meter |
| Entfernung erkennen (Auto: 4,2x1,8m) | 291 Meter |
| Verifizierte Entfernung (Auto: 4,2 x 1,8 m) | 145 Meter |
| Arbeitsweise | Ungekühlte VOx-Wärmebildkamera mit langer Welle (8 μm – 14 μm) |
| Detektorpixel | 640*512 |
| Pixelgröße | 12 μm |
| Fokussierungsmethode | Athermisches Festbrennweitenobjektiv |
| NETD | ≤40 mK bei F1,0 bei 25 °C |
| Farbpalette | Weiß heiß, schwarz heiß, Pseudofarbe |
| IR-Kamera-Objektverfolgung | |
| Aktualisierungsrate des Abweichungspixels | 30 Hz |
| Ausgabeverzögerung des Abweichungspixels | <30 ms |
| Minimaler Objektkontrast | 5 % |
| SNR | 4 |
| Minimale Objektgröße | 16*16 Pixel |
| Maximale Objektgröße | 256*256 Pixel |
| Tracking-Geschwindigkeit | ±48 Pixel/Frame |
| Objektspeicherzeit | 100 Bilder |
| IR-Kamera-KI-Leistung | |
| Zieltyp | Auto und Mensch |
| Gleichzeitige Erfassungsmenge | ≥ 10 Ziele |
| Minimales Kontrastverhältnis | 5 % |
| Minimale Zielgröße | 5×5 Pixel |
| Autoerkennungsrate | ≥85 % |
| Falschalarmrate | ≤10 % |
| Merkmale | |
| OSD | Anzeige des Gier- und Nickwinkels des Gimbals, der Vergrößerung, der Aufzeichnungsdauer der Karte, des GPS und der Flughöhe des Flugzeugs, des Datums und der Uhrzeit |
| Geotagging | Zeit und GPS-Koordinaten im Bild-Exif anzeigen |
| Kartenlegen online | HTTP-Lesebilder oder -Videos |
| KLV (UDP) | Kartenaufzeichnung oder Viewlink-Videowiedergabe |
| ArduPilot / PX4 | Unterstützung (Mavlink-Protokoll) Optional: Unterstützung der Ardupilot-Follow-me-Funktion |
| Video-Stitching | IR1+IR2 / IR2+IR1 / IR1 / IR2 |
| Dualer Videostream-Ausgang (optional) | Unterstützt (IR1 und IR2 mit zwei Stream-Ausgängen, Hinweise: Sobald der duale Video-Stream-Ausgang aktiviert ist, ist keine Aufnahme mehr möglich) |
| Verpackungsinformationen | |
| NW | 720±10g (Viewport-Version mit Viewport) |
| Produktmaße | 114,5*105*171,8 mm / 114,5*105*180,8 mm (Viewport-Version mit Viewport) |
| Zubehör | 1 Stück Gimbal-Kameragerät, Schrauben, Aluminiumzylinder, Dämpfungskugeln, Dämpfungsplatten, 1 Stück USB-zu-TTL-Kabel / Hochwertige Kunststoffbox mit Schaumstoffpolster |
| GW | Schweins-Schinken ca. 1820g |
| Paketmaße | 300 x 250 x 200 mm |
Weitere Einzelheiten finden Sie unter AT9-50 Dual IR 5x Thermal Zoom FOV Flexibility Gimbal Camera