7. Q: ¿Cómo configurar el control de vuelo de código abierto para resolver el problema de inclinación del eje de balanceo del cardán cuando el ala fija gira demasiado rápido?
Respuesta:
Conecte el puerto serie del cardán a un TELEM de un controlador de vuelo de código abierto (por ejemplo: Pixhawk) para compensar la deriva del horizonte durante el vuelo de alta dinámica.
Configuraciones de parámetros del puerto TELEM del FC: tasa de baudios 115200, MAvlink1.
Establezca los parámetros en ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Donde “x” es el número de puerto. El valor es 1 (Mavlink).
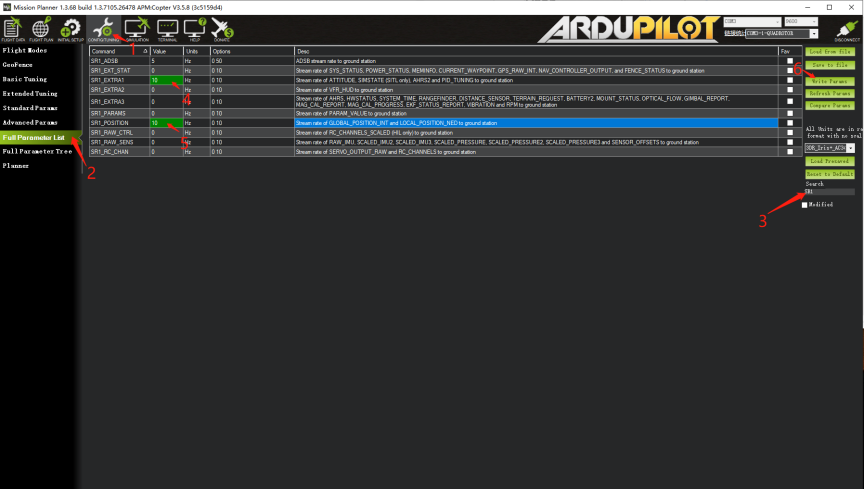
Además, establezca las siguientes tasas de mensajes para este puerto:
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
Nota: Todos los demás parámetros SRx_xx deben establecerse en 0 para evitar que datos innecesarios sobrecarguen el canal.