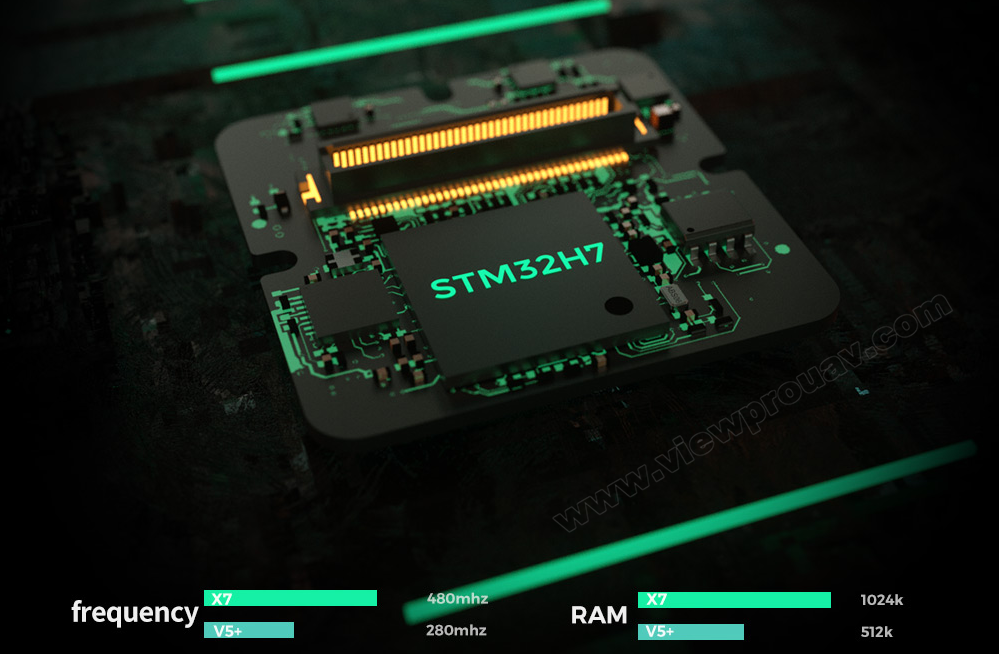
Más rápido que nunca
La serie X7 de piloto automático utiliza procesadores de la serie STM32H7, la frecuencia de operación de la CPU se ha incrementado a 480Mhz, almacenamiento de 1024K, FLASH 2048K, tiene un procesador más rápido y un almacenamiento más grande, y utiliza 512K EEPROM, puede expandir los waypoints a 2048, brindando más imaginación a las aplicaciones de vuelo.
Adaptarse a entornos hostiles
La serie x7 del piloto automático adopta una gran cantidad de chips de nivel automotriz y tiene un sistema de compensación de temperatura de sensor de alta precisión incorporado, lo que hace que el sensor funcione a una temperatura constante para garantizar que el sensor pueda operar con alta precisión y alta sensibilidad en entornos de alta y baja temperatura.
Siempre estable
Se utilizan sensores de la serie Invensense + Bosch + ADI + TE, que tienen un menor ruido y un rendimiento más fuerte contra choques y vibraciones. Con la brújula de grado industrial RM3100, la estabilidad de vuelo y el rendimiento anti-interferencia han traído una mejora cualitativa.

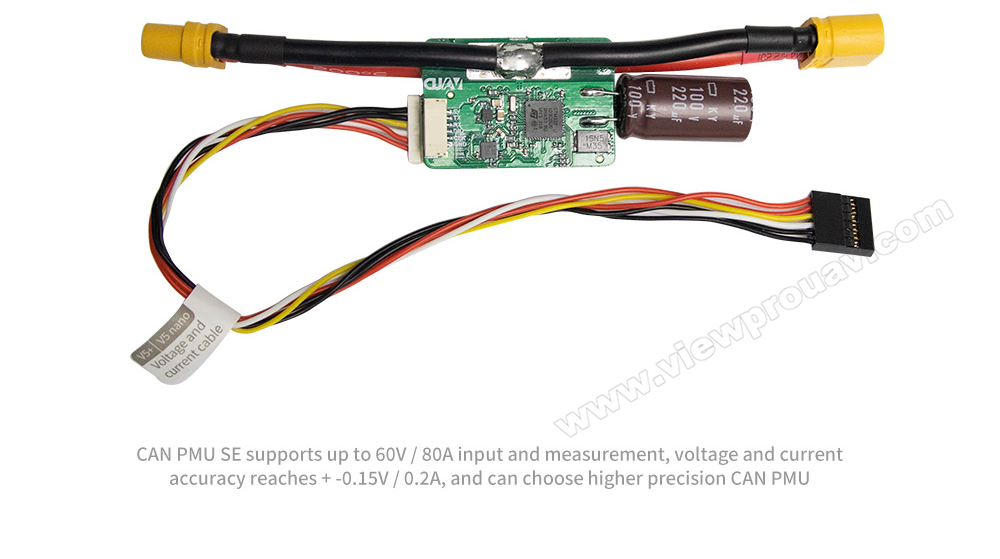
Lista de embalaje estándar con módulo de potencia digital
la lista de empaque predeterminada incluye el módulo de detección de potencia digital PMU-SE del protocolo UAVCAN, con el algoritmo ITT desarrollado internamente por CUAV, que ayuda a medir con precisión el voltaje y la corriente en tiempo real del UAV, y hace que la estimación del tiempo de vuelo sea más confiable.
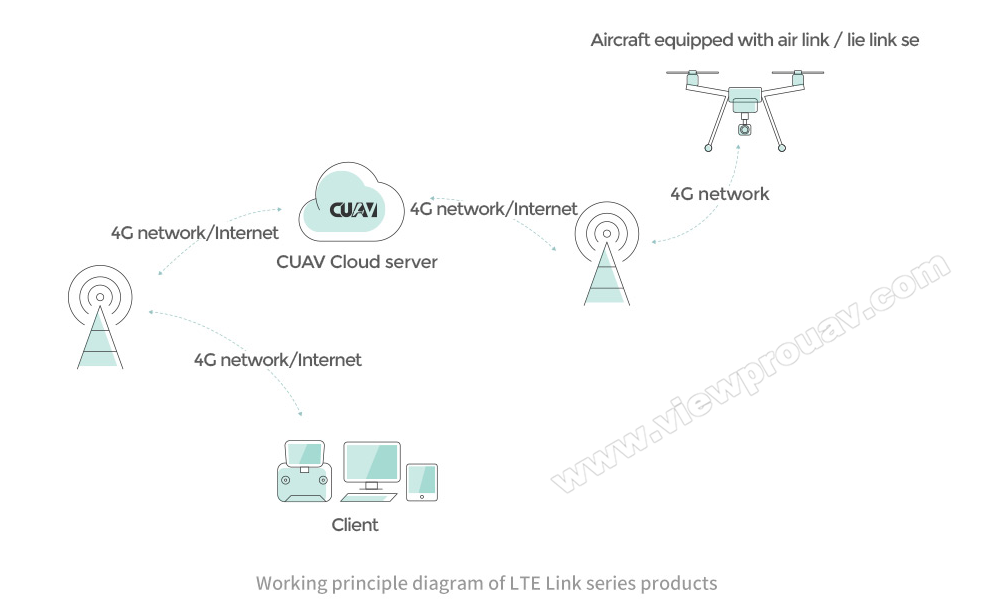
Opcional: Hardware de acceso a la nube CUAV Enlace LTE
Toda la serie de autopilotos CUAV soporta la serie de enlaces de comunicación LTE Link de la plataforma en la nube Lei Xun. Se comunican a través de redes 4G y 5G, control sin distancia, soportan transmisión de video en alta definición en tiempo real y compartición de video, y soportan funciones de asignación de permisos y gestión de equipos de drones.