7. Q : Comment configurer le contrôle de vol open source pour résoudre le problème d'inclinaison de l'axe de roulis du cardan lorsque l'aile fixe tourne trop vite ?
Répondre:
Connectez le port série du cardan à un TELEM d'un contrôle de vol open source (par exemple : Pixhawk) pour compenser la dérive d'horizon pendant un vol hautement dynamique.
Paramètres du port FC TELEM : débit en bauds 115200, MAvlink1.
Définissez les paramètres dans ArduPilot :
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Où « x » est le numéro de port. La valeur est 1 (Mavlink).
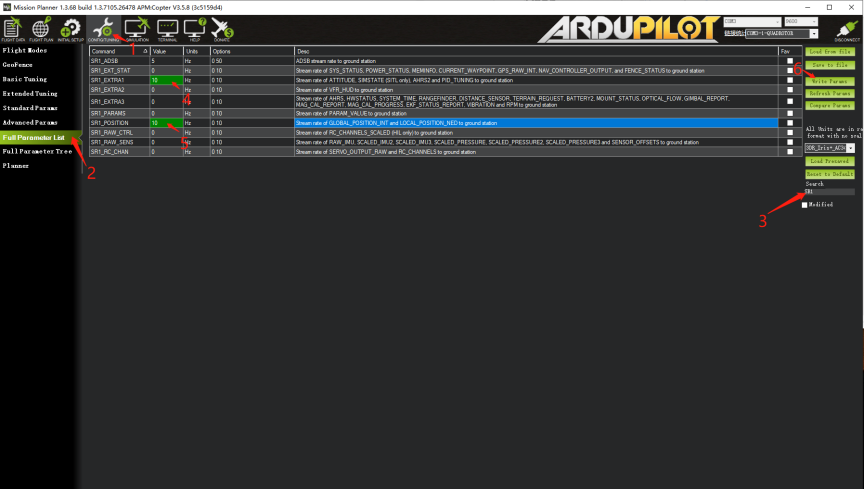
De plus, définissez les débits de messages suivants pour ce port :
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
Remarque : tous les autres paramètres SRx_xx doivent être définis sur 0 pour éviter que des données inutiles ne surchargent le canal.