7. D: Come impostare il controllo di volo open source per risolvere il problema di inclinazione dell'asse di rollio del giunto cardanico quando un'ala fissa gira troppo velocemente?
Risposta:
Collegare la porta seriale del gimbal a un TELEM di un controllo di volo open source (ad esempio: Pixhawk) per compensare la deriva dell'orizzonte durante il volo ad alta dinamica.
Impostazioni dei parametri della porta FC TELEM: velocità in baud 115200, MAvlink1.
Imposta i parametri in ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Dove "x" è il numero di porta. Il valore è 1 (Mavlink).
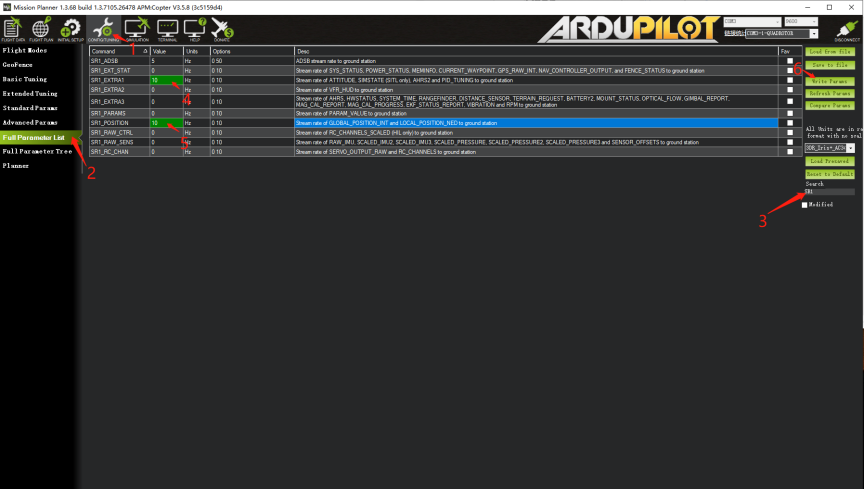
Inoltre, imposta le seguenti velocità dei messaggi per questa porta:
•SRx_EXTRA1 = 10
•SRx_POSIZIONE = 10
Nota: tutti gli altri parametri SRx_xx devono essere impostati su 0 per evitare che dati non necessari sovraccarichino il canale.