7. 질문: 고정 날개가 너무 빨리 회전할 때 짐벌의 롤 축 기울기 문제를 해결하기 위해 오픈 소스 비행 제어를 어떻게 설정해야 합니까?
답변:
높은 동적 비행 중 수평 이동을 보상하기 위해 오픈 소스 비행 제어(예: Pixhawk)의 TELEM에 짐벌 직렬 포트를 연결합니다.
FC TELEM 포트 매개변수 설정: 통신 속도 115200, MAvlink1.
ArduPilot에서 매개변수를 설정합니다:
•직렬x보드 = 115
•직렬x프로토콜 = 1
여기서 "x"는 포트 번호입니다. 값은 1(Mavlink)입니다.
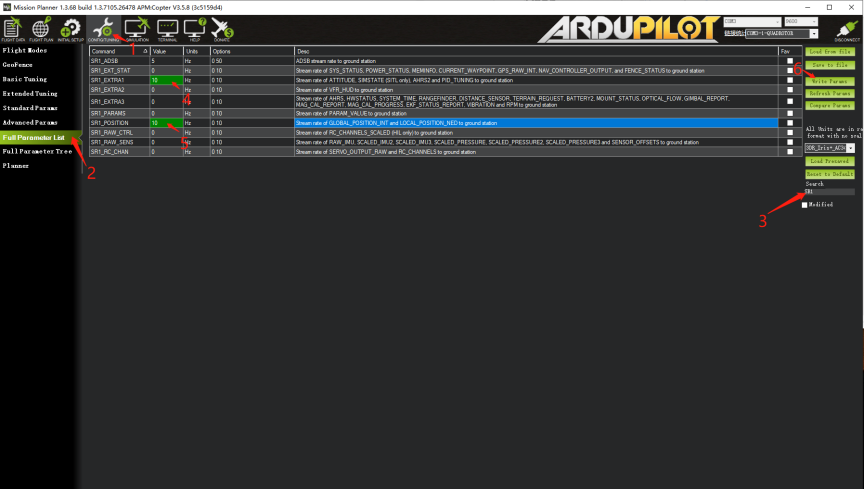
또한, 이 포트에 대해 다음 메시지 속도를 설정합니다.
•SRx_EXTRA1 = 10
•SRx_위치 = 10
참고: 불필요한 데이터로 인해 채널이 과부하되는 것을 방지하기 위해 다른 모든 SRx_xx 매개변수는 0으로 설정해야 합니다.