7. ถาม: จะตั้งค่าการควบคุมการบินแบบโอเพ่นซอร์สเพื่อแก้ไขปัญหาการเอียงแกนม้วนของกิมบอลเมื่อปีกคงที่หมุนเร็วเกินไปได้อย่างไร
คำตอบ:
เชื่อมต่อพอร์ตซีเรียลแบบ gimbal เข้ากับ TELEM ของระบบควบคุมการบินโอเพ่นซอร์ส (เช่น Pixhawk) เพื่อชดเชยการเลื่อนขอบฟ้าในระหว่างการบินแบบไดนามิกสูง
การตั้งค่าพารามิเตอร์พอร์ต FC TELEM: บอดเรท 115200, MAvlink1
ตั้งค่าพารามิเตอร์ใน ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
โดยที่ “x” คือหมายเลขพอร์ต ค่าคือ 1 (Mavlink)
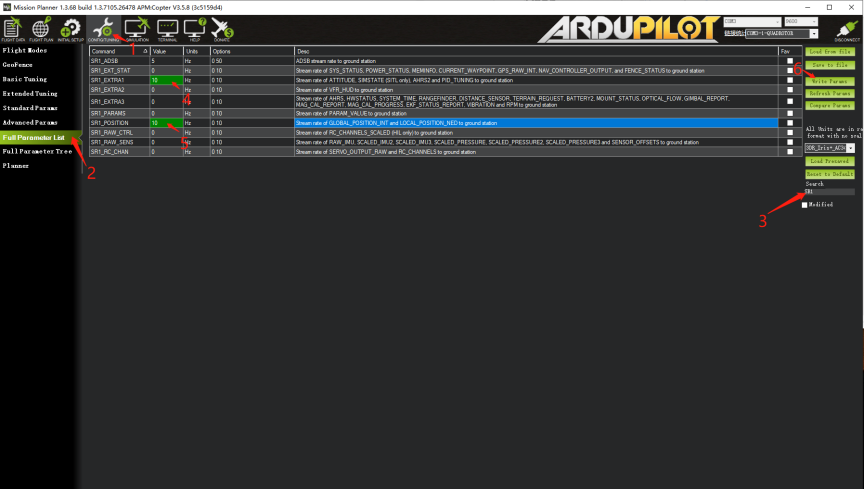
นอกจากนี้ ให้ตั้งค่าอัตราข้อความต่อไปนี้สำหรับพอร์ตนี้:
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
หมายเหตุ: พารามิเตอร์ SRx_xx อื่นๆ ทั้งหมดควรตั้งเป็น 0 เพื่อป้องกันไม่ให้ข้อมูลที่ไม่จำเป็นโหลดช่องมากเกินไป