7. S: Sabit kanat çok hızlı döndüğünde gimbal'ın yuvarlanma ekseninin eğilme sorununu çözmek için açık kaynaklı uçuş kontrolü nasıl kurulur?
Cevap:
Yüksek dinamik uçuş sırasında ufuk kaymasını telafi etmek için gimbal seri portunu açık kaynaklı bir uçuş kontrolünün (örneğin: Pixhawk) TELEM'ine bağlayın.
FC TELEM port parametre ayarları: baud hızı 115200, MAvlink1.
ArduPilot'ta parametreleri ayarlayın:
•SERIALx_BAUD = 115
•SERIALx_PROTOKOL = 1
Burada “x” port numarasıdır. Değer 1'dir (Mavlink).
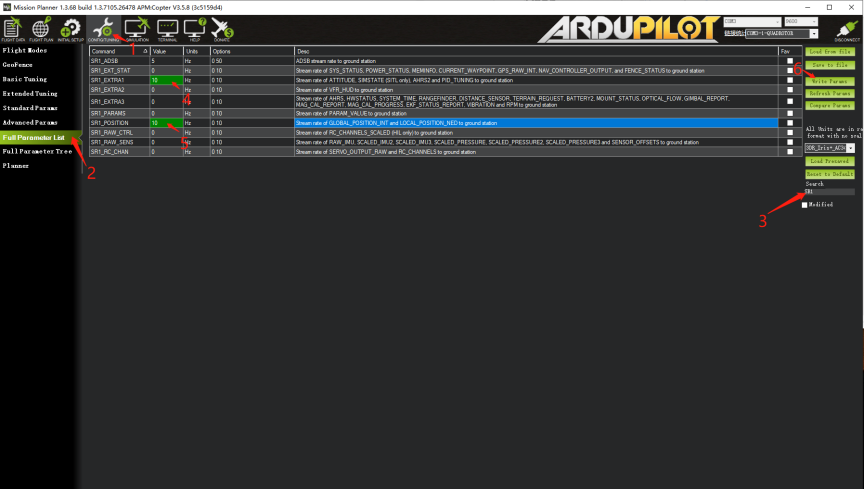
Ayrıca bu port için aşağıdaki mesaj hızlarını ayarlayın:
•SRx_EKSTRA1 = 10
•SRx_POZİSYONU = 10
Not: Kanalın gereksiz verilerle aşırı yüklenmesini önlemek için diğer tüm SRx_xx parametreleri 0 olarak ayarlanmalıdır.