









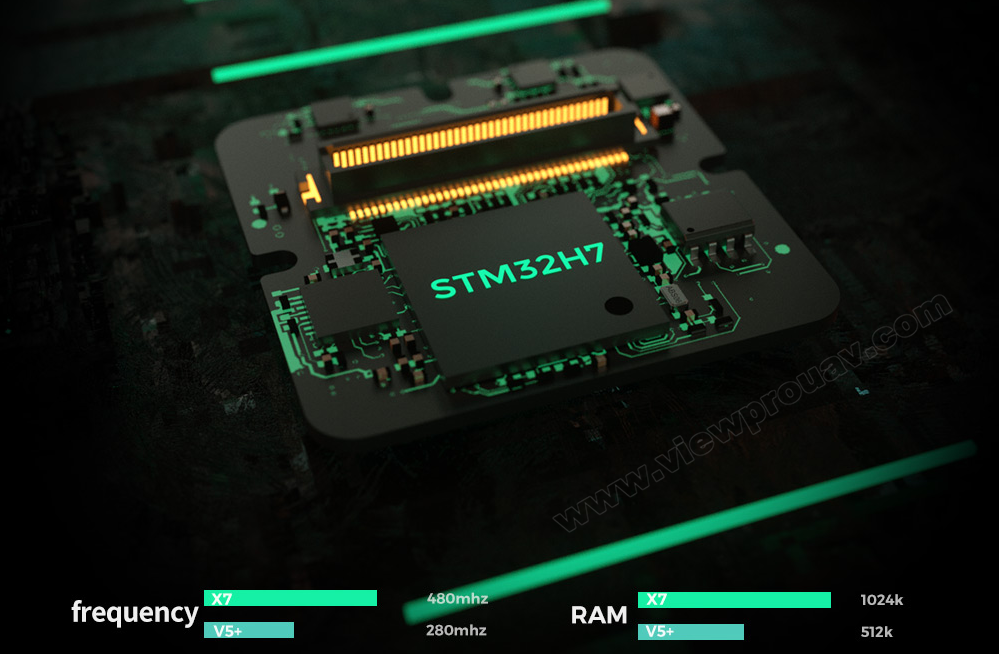
Schneller als je zuvor
Der Autopilot der X7-Serie verwendet Prozessoren der STM32H7-Serie, die CPU-Betriebsfrequenz wurde auf 480 MHz erhöht, der Speicher beträgt 1024 K, der FLASH 2048 K, er hat einen schnelleren Prozessor und größeren Speicher und verwendet 512 K EEPROM, kann Wegpunkte auf 2048 erweitern und bringt mehr Fantasie in Fluganwendungen
Anpassung an raue Umgebungsbedingungen
Der Autopilot der x7-Serie verwendet eine große Anzahl Chips auf Fahrzeugniveau und verfügt über ein integriertes, hochpräzises Sensortemperaturkompensationssystem, das dafür sorgt, dass der Sensor bei konstanter Temperatur arbeitet, um sicherzustellen, dass der Sensor in Umgebungen mit hohen und niedrigen Temperaturen mit hoher Genauigkeit und hoher Empfindlichkeit arbeiten kann.
Immer stabil
Es werden Sensoren der Serien Invensense + Bosch + ADI + TE verwendet, die weniger Rauschen und eine stärkere Stoß- und Vibrationsfestigkeit aufweisen. Mit dem Industriekompass RM3100 haben sich Flugstabilität und Entstörungsleistung qualitativ verbessert

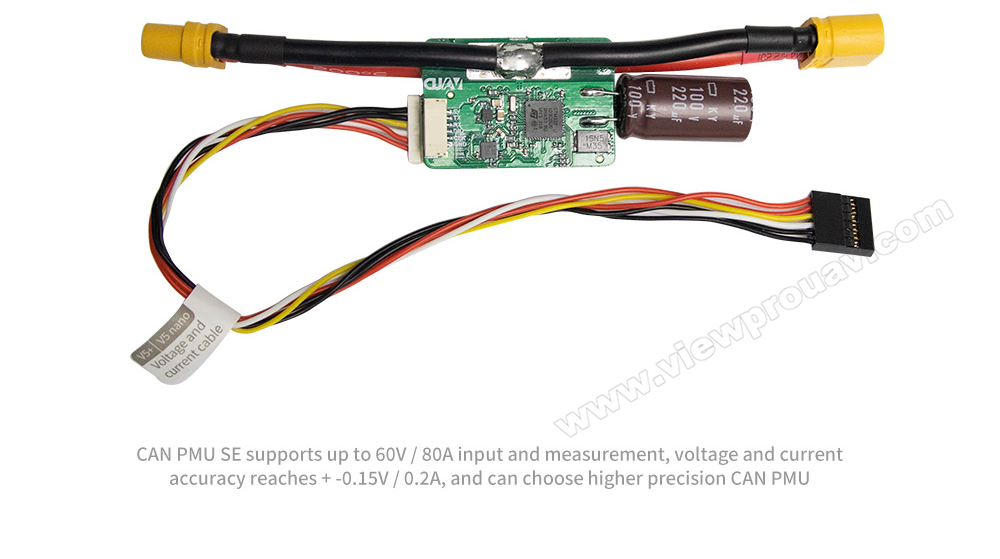
Standardpackliste mit digitalem Powermodul
Die Standardpackliste umfasst ein digitales PMU-SE-Digitalleistungserkennungsmodul mit UAVCAN-Protokoll und einen integrierten, von CUAV selbst entwickelten ITT-Algorithmus, der dabei hilft, Spannung und Stromstärke des UAV in Echtzeit genau zu messen und die Flugzeitschätzung zuverlässiger zu machen.
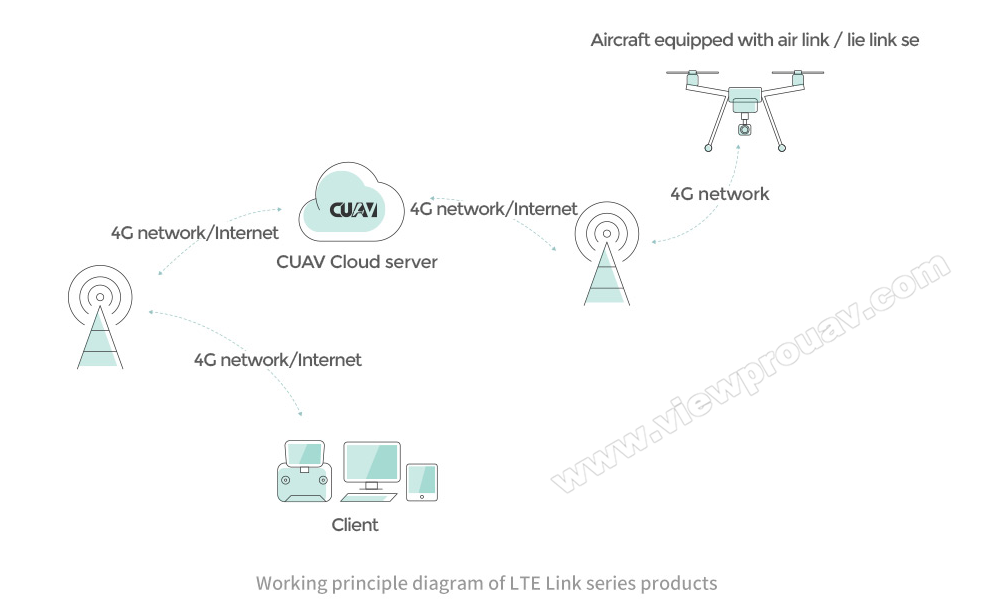
Optional: CUAV Cloud-Zugriffshardware LTE Link
Alle Autopiloten der CUAV-Serie unterstützen die LTE Link-Serie von Kommunikationsverbindungen der Lei Xun-Cloud-Plattform. Sie kommunizieren über 4G- und 5G-Netzwerke, steuern ohne Distanz, unterstützen hochauflösende Videoübertragung und Videofreigabe in Echtzeit und unterstützen die Berechtigungszuweisung und Drohnen-Teamverwaltungsfunktionen.
UAVCAN-Protokoll
UAVCAN Standardprotokoll, hohe
Echtzeit, starke Entstörung
Eingebautes hochpräzises Barometer
Eingebautes hochpräzises Barometer, um den Anforderungen verschiedener Anwendungsszenarien gerecht zu werden

NEO V2 Pro verwendet ein SAW + LNA + SAW-Doppelfilterdesign, das den Einfluss von Fernbedienung, digitaler Übertragung und 4G-Signalen auf den GPS-Positionsempfang wirksam vermeidet.

Programm Open Source, unterstützt benutzerdefinierte Programme