









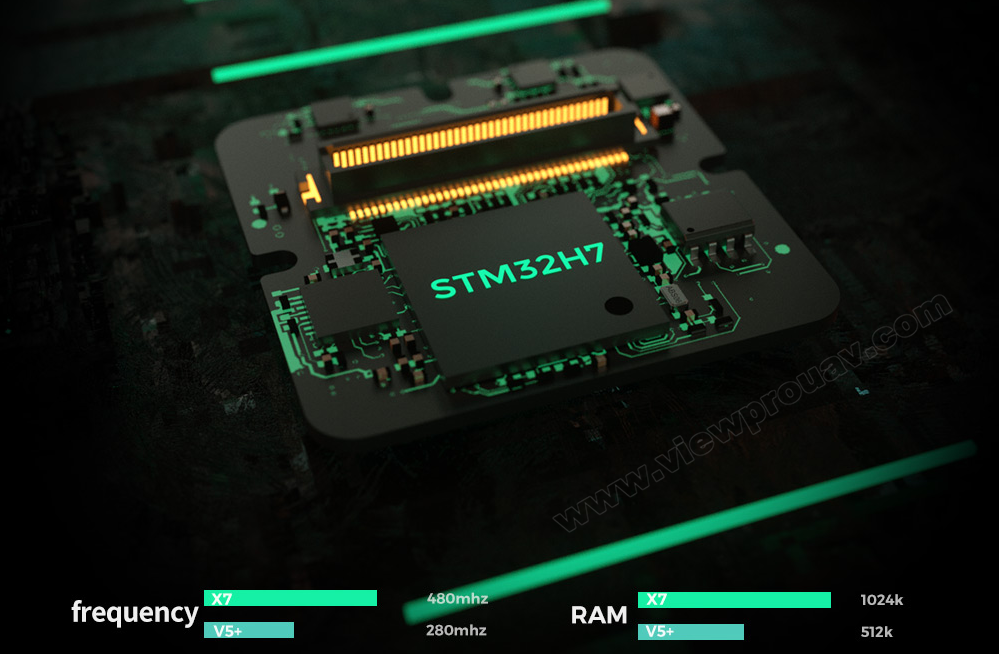
Faster than ever
X7 series autopilot use STM32H7 series processors, CPU operating frequency increased to 480Mhz, storage 1024K,FLASH 2048K, has a faster processor and larger storage,and uses 512K EEPROM, can expand waypoints to 2048,Bring more imagination to flight applications
Adapt to harsh environment
The x7 series autopilot adopts a large number of car-level chips and has a built-in high-precision sensor temperature compensation system, which makes the sensor work at a constant temperature to ensure that the sensor can operate with high accuracy and high sensitivity in high and low temperature environments.
Always stable
Invensense + Bosch + ADI+ TE series sensors are used,which have lower noise and stronger anti-shock and vibration performance. With the industrial-grade compass RM3100, the flight stability and anti-interference performance have brought a qualitative improvement

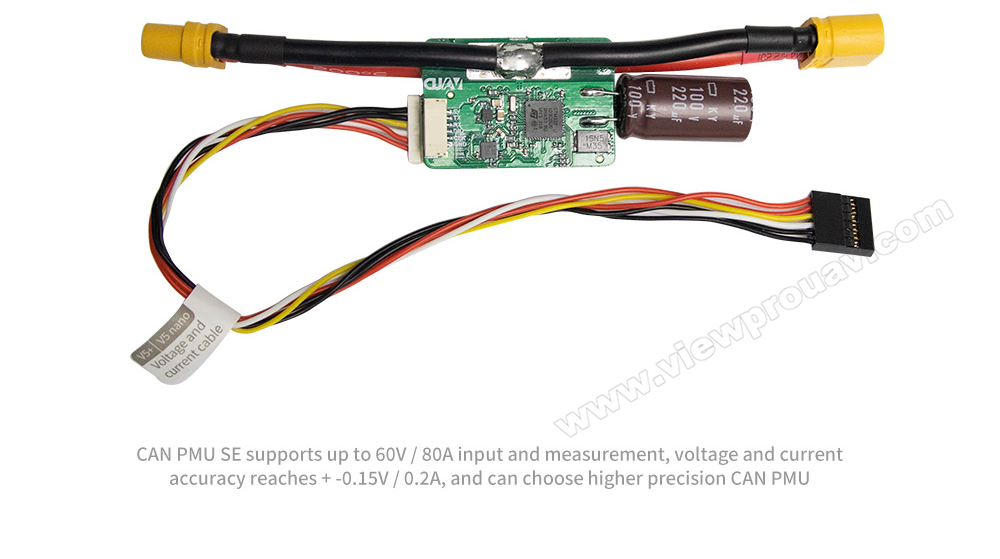
Standard packing list with digital power module
default packing list include UAVCAN protocol digital PMU-SE digital power detection module, built-in CUAV self-developed ITT algorithm, help accurately measure the real-time voltage and current of the UAV,and make the flight time estimation more reliable.
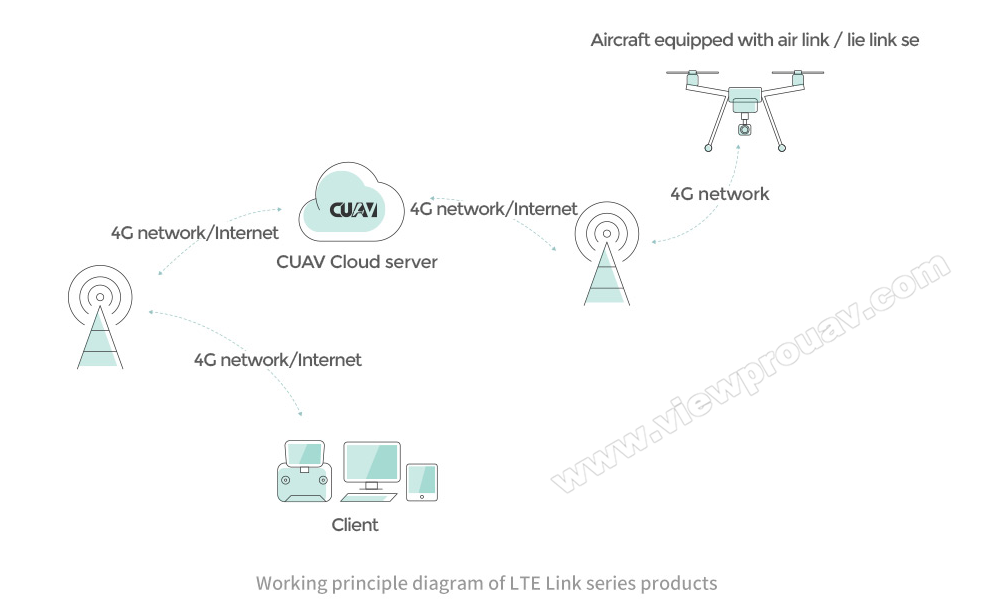
Optional:CUAV Cloud access hardware LTE Link
All the CUAV series of autopilot support the LTE Link series of communication links of the Lei Xun cloud platform. They communicate through 4G and 5G networks, control without distance, support real-time high-definition video transmission and video sharing,and support permission allocation and drones Team management functions.
UAVCAN protocol
UAVCAN standard protocol, high
real-time, strong anti-interference
Built-in high-precision barometer
Built-in high-precision barometer to meet the needs of different application scenarios

NEO V2 Pro adopts SAW +LNA +SAW dual filtering design, which effectively avoids the influence of remote control, digital transmission, and 4G signals on GpS positioning reception.

Program open source, supports custom programs