
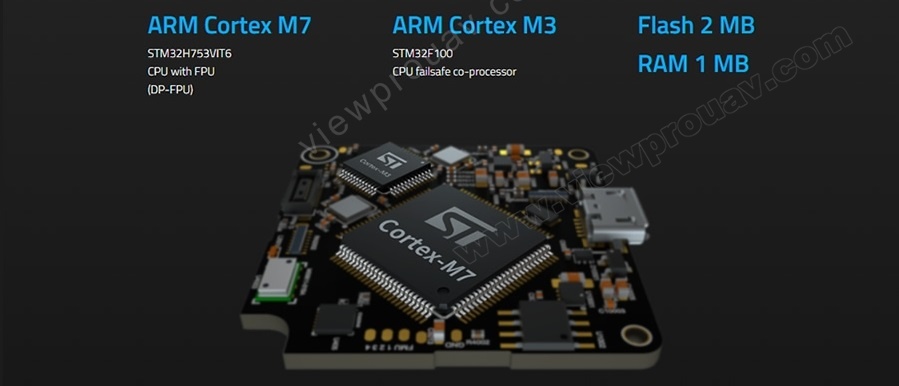
Ausgestattet mit einem leistungsstarken H7-Prozessor
H7 verfügt über eine FPU mit doppelter Genauigkeit (DP), 1 MB RAM und einen 400-MHz-CPU-Prozessor für hohe Leistung, extrem schnellen Betrieb und eine stabile Lösung für den Flug.
Situationsbewusstsein durch integriertes ADS-B
Ein kundenspezifischer 1090-MHz-ADS-B-Empfänger von uAvionix wurde in die neue ADS-B-Trägerplatine integriert. Dies bietet neue Funktionen ohne Größenzunahme. Mit der neuen Trägerplatine ausgestattete UAVs können die Fluglage kommerzieller bemannter Flugzeuge innerhalb der Reichweite von ADS-B empfangen. Dies informiert den UAS-Betreiber effektiv und ermöglicht ihm, die Risiken seines aktuellen Betriebs einzuschätzen.

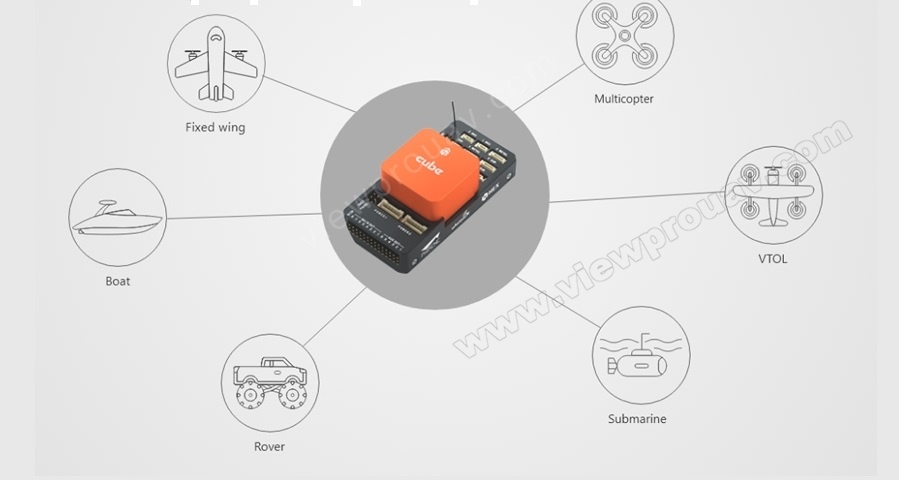
Unterstützung für mehrere Fahrzeugtypen
Einschließlich Hubschrauber, Multikopter, Starrflügelflugzeuge, VTOL, Rover, Boot, U-Boot usw.
Dreifach redundantes IMU-System
Ausgestattet mit verbesserten Sensoren für ein zuverlässigeres und sichereres System.

Einfaches Umschalten der PWM-Ausgangssignalspannung
Der PWM-Ausgang unterstützt das Umschalten zwischen 3,3 V und 5 V Signalpegeln. Die Spannungsumschaltung kann über die Software der Bodenkontrollstation erfolgen. Dies verbessert die Kompatibilität mit verschiedenen externen Peripheriegeräten.