
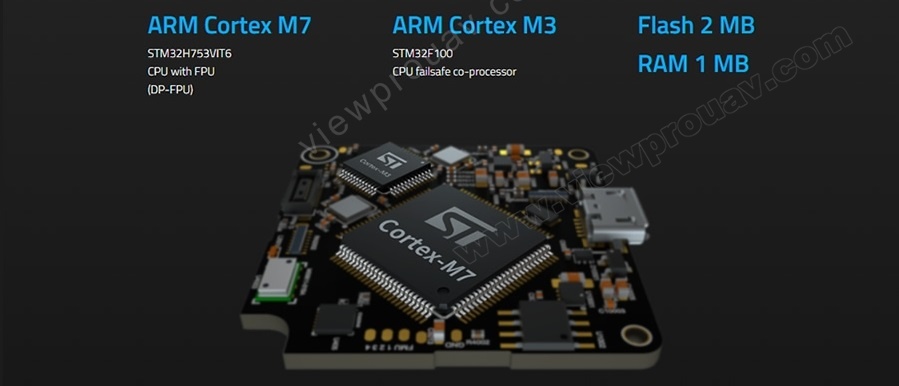
Equipped with High Performance H7 Processor
H7 has double-precision (DP) FPU, 1MB RAM, and 40OMHz CPU processor provides high performance, extremely fast operation, and stable solution for flight.
Situational Awareness by Integrated ADS-B
A 1090MHz customized ADS-B receiver from uAvionix has been integrated into the new ADS-B carrier board.This provides new function without size increment.UAVs equipped with the new carrier board can receive attitude of commercial manned aircrafts within the range of ADS-B out. This effectively informs the UAS operator to enable them to assess the risks on their current operation.

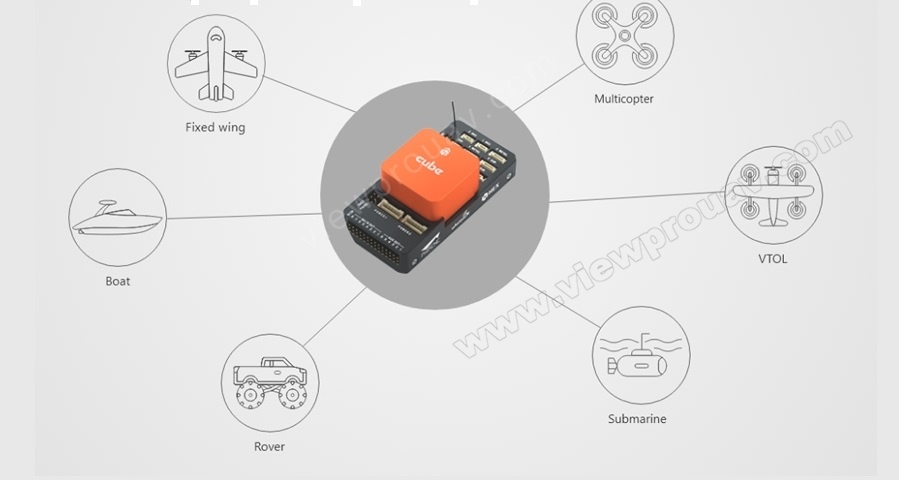
Support for multiple vehicle types
Including Helicopter, qnulticopter, fixed wing, VTOL, Rover, Boat, Submarine, etc
Triple redundant IMU system
Packed with upgraded sensors providing more reliable and safe system.

Easy switching of PWM output signal voltage
PWM output supports switching between 3.3V and 5V signal levels. Voltage switching can be done by ground control station software. This improves compatibility with various external peripherals.