


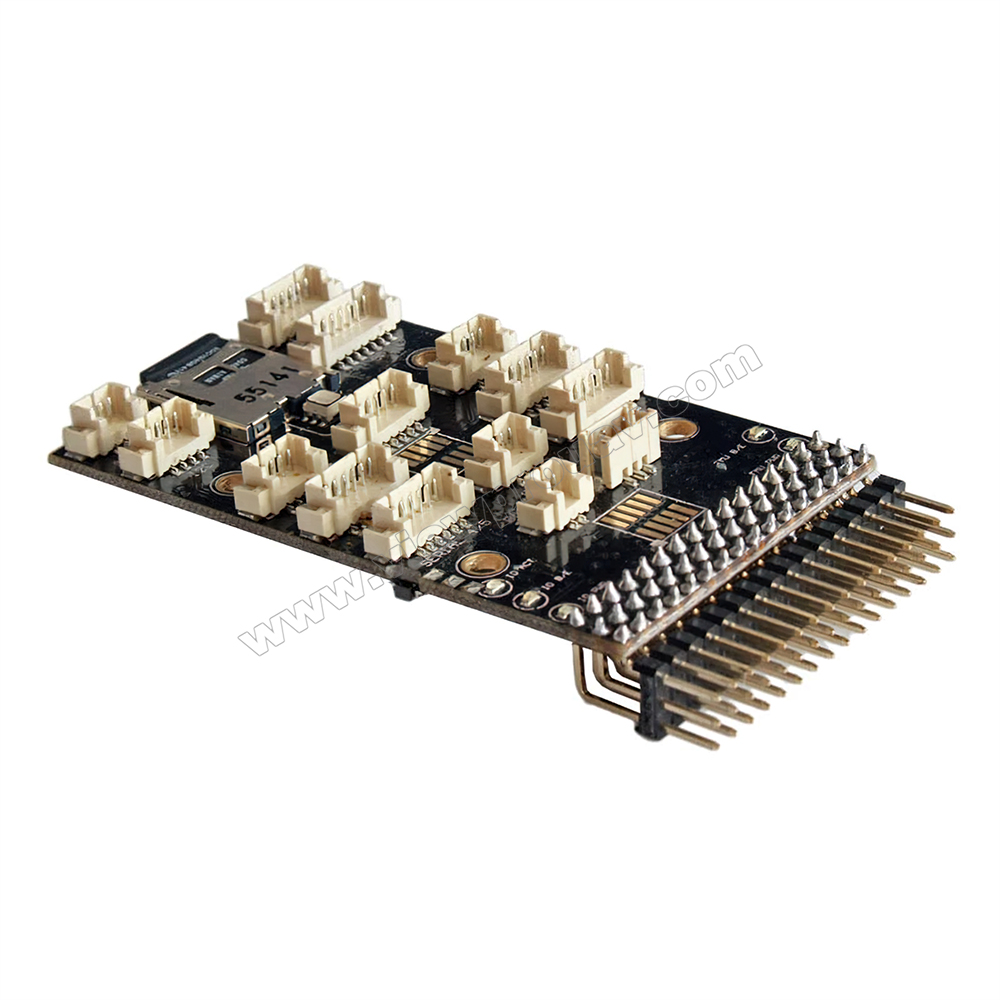



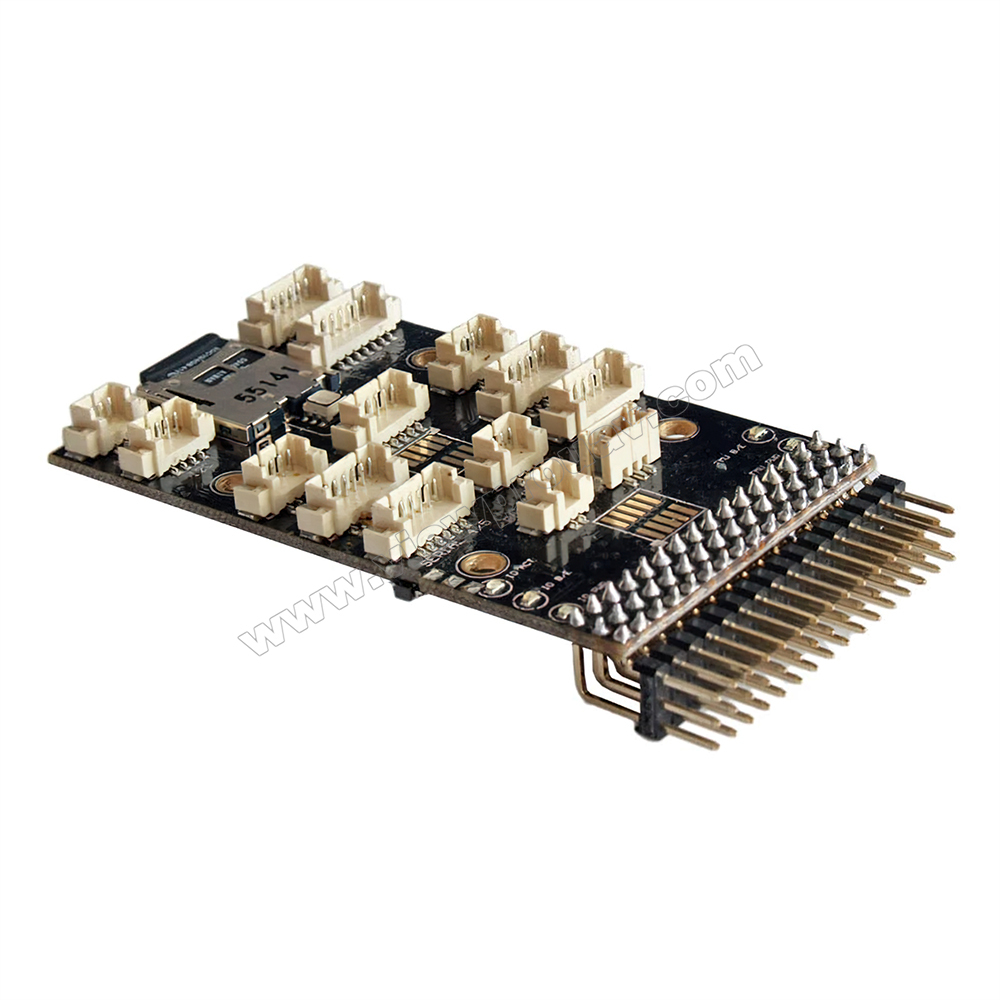



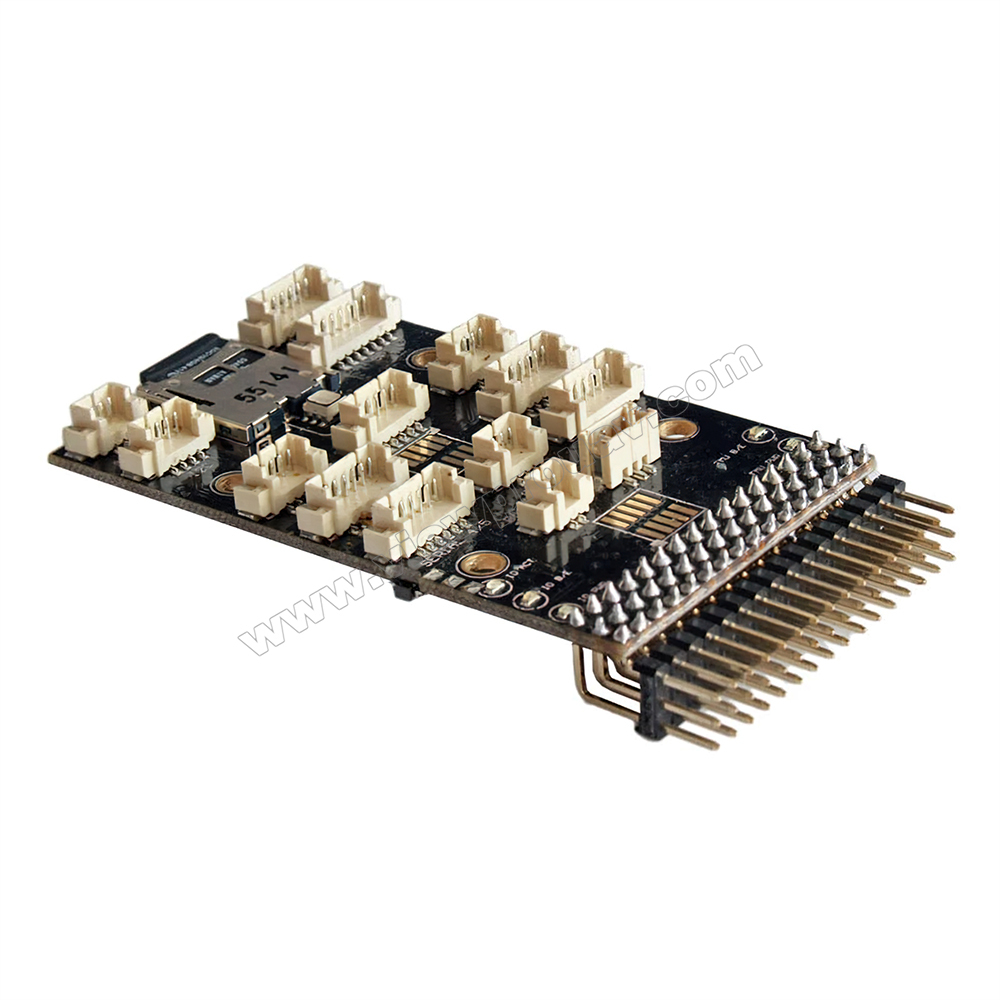

PX4 2.4.8 wurde kürzlich vom bekannten Hersteller von Open-Source-Flugsteuerungshardware veröffentlicht und ist eine neue Generation von Flugsteuerungssystemen. Es verwendet einen leistungsstarken 32-Bit-ARM-Prozessor, die gesamte Hardware ist Open Source und die verwendeten Chips und Sensoren sind offengelegt. Alle Busse und Peripheriegeräte werden exportiert und sind nicht nur mit anderen Peripheriegeräten kompatibel, sondern auch praktischer für Benutzer mit starken Entwicklungsfähigkeiten. Die Flugsteuerung verfügt über integrierte Dualprozessoren, von denen einer ein leistungsstarker 32-Bit-Prozessor stm32f427cortex, M4-Core 168 MHz/256 KB RAM/2 MB Flash ist; der andere ist ein Coprozessor für den industriellen Einsatz: 32-Bit STM32F103, der stabil läuft und einen sicheren Betrieb gewährleistet.








Produkteinführung
Spezifikation
PX4 2.4.8 Autopilot Open Source Flugcontroller Spezifikation
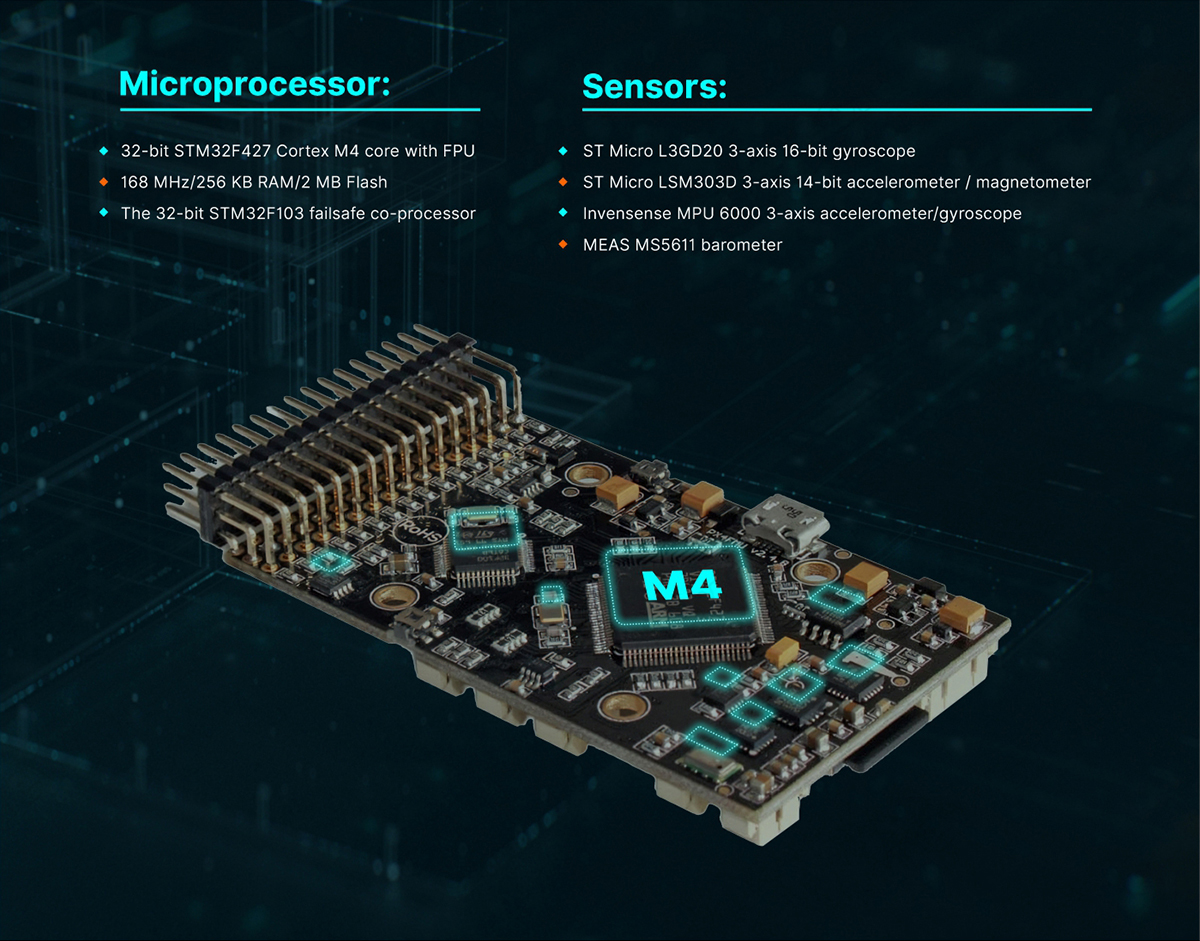
Mikroprozessor:
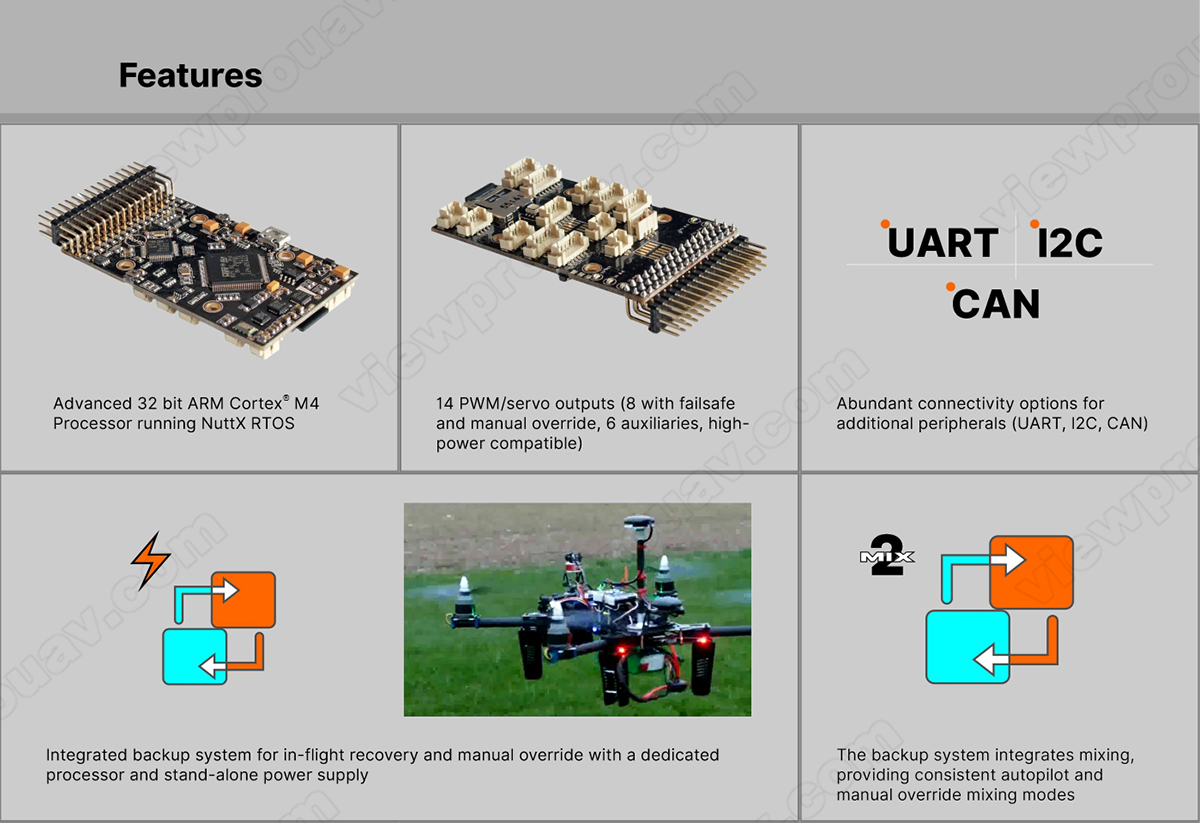
32-Bit STM32F427 Cortex M4-Kern mit FPU
168 MHz / 256 KB RAM / 2 MB Flash
- 32-Bit STM32F103 ausfallsicherer Coprozessor
Sensoren:
L3GD20 3-Achsen-16-Bit-Gyroskop
- LSM303D 3-Achsen 14-Bit Beschleunigungsmesser / Magnetometer
- MPU 6000 3-Achsen-Beschleunigungsmesser/Gyroskop
- 5611 Barometer
Schnittstellen:
- 5x UART (serielle Ports), einer mit hoher Leistung, 2x mit HW-Flusskontrolle
- 2x CAN
- S.BUS Eingang und Ausgang
- PPM Summensignal
- RSSI-Eingang (PWM oder Spannung)
- I2C
- SPI
- 3,3 und 6,6 V ADC-Eingänge
Externer Micro-USB-Anschluss
Stromversorgungssystem:
- Idealer Diodenregler mit automatischem Failover
- Servoschiene hochleistungsfähig (7 V) und hochstromfähig
- Alle Peripherieausgänge überstromgeschützt, alle Eingänge ESD-geschützt
Gewicht und Abmessungen:
Gewicht: 38 g (1,31 oz)
Breite: 50 mm (1,96 Zoll)
Dicke: 15,5 mm (0,61 Zoll)
Länge: 81,5 mm (3,21 Zoll)
GPS-Spezifikationen
Geschwindigkeitsgenauigkeit: 0,1 m/s
Max. Höhe: 50.000 m
Höchstgeschwindigkeit: 515 m/s
Max. Beschleunigung: 4 G
Aktualisierungsrate: 10 Hz
Zeit bis zur ersten Lösung: Kaltstart: 26 s, Heißstart: 1 s
Stromversorgung: Spannung DC 5V±5%
Durchmesser: 54 mm / 2,126 Zoll
Dicke: 15 mm
Weitere Einzelheiten finden Sie unter PX4 2.4.8 Autopilot Open Source Flight Controller für Drohnenentwickler
-
Produkteinführung
-
Spezifikation
PX4 2.4.8 wurde kürzlich vom bekannten Hersteller von Open-Source-Flugsteuerungshardware veröffentlicht und ist eine neue Generation von Flugsteuerungssystemen. Es verwendet einen leistungsstarken 32-Bit-ARM-Prozessor, die gesamte Hardware ist Open Source und die verwendeten Chips und Sensoren sind offengelegt. Alle Busse und Peripheriegeräte werden exportiert und sind nicht nur mit anderen Peripheriegeräten kompatibel, sondern auch praktischer für Benutzer mit starken Entwicklungsfähigkeiten. Die Flugsteuerung verfügt über integrierte Dualprozessoren, von denen einer ein leistungsstarker 32-Bit-Prozessor stm32f427cortex, M4-Core 168 MHz/256 KB RAM/2 MB Flash ist; der andere ist ein Coprozessor für den industriellen Einsatz: 32-Bit STM32F103, der stabil läuft und einen sicheren Betrieb gewährleistet.
PX4 2.4.8 Autopilot Open Source Flugcontroller Spezifikation
Mikroprozessor:
32-Bit STM32F427 Cortex M4-Kern mit FPU
168 MHz / 256 KB RAM / 2 MB Flash
- 32-Bit STM32F103 ausfallsicherer Coprozessor
Sensoren:
L3GD20 3-Achsen-16-Bit-Gyroskop
- LSM303D 3-Achsen 14-Bit Beschleunigungsmesser / Magnetometer
- MPU 6000 3-Achsen-Beschleunigungsmesser/Gyroskop
- 5611 Barometer
Schnittstellen:
- 5x UART (serielle Ports), einer mit hoher Leistung, 2x mit HW-Flusskontrolle
- 2x CAN
- S.BUS Eingang und Ausgang
- PPM Summensignal
- RSSI-Eingang (PWM oder Spannung)
- I2C
- SPI
- 3,3 und 6,6 V ADC-Eingänge
Externer Micro-USB-Anschluss
Stromversorgungssystem:
- Idealer Diodenregler mit automatischem Failover
- Servoschiene hochleistungsfähig (7 V) und hochstromfähig
- Alle Peripherieausgänge überstromgeschützt, alle Eingänge ESD-geschützt
Gewicht und Abmessungen:
Gewicht: 38 g (1,31 oz)
Breite: 50 mm (1,96 Zoll)
Dicke: 15,5 mm (0,61 Zoll)
Länge: 81,5 mm (3,21 Zoll)
GPS-Spezifikationen
Geschwindigkeitsgenauigkeit: 0,1 m/s
Max. Höhe: 50.000 m
Höchstgeschwindigkeit: 515 m/s
Max. Beschleunigung: 4 G
Aktualisierungsrate: 10 Hz
Zeit bis zur ersten Lösung: Kaltstart: 26 s, Heißstart: 1 s
Stromversorgung: Spannung DC 5V±5%
Durchmesser: 54 mm / 2,126 Zoll
Dicke: 15 mm
Weitere Einzelheiten finden Sie unter PX4 2.4.8 Autopilot Open Source Flight Controller für Drohnenentwickler