


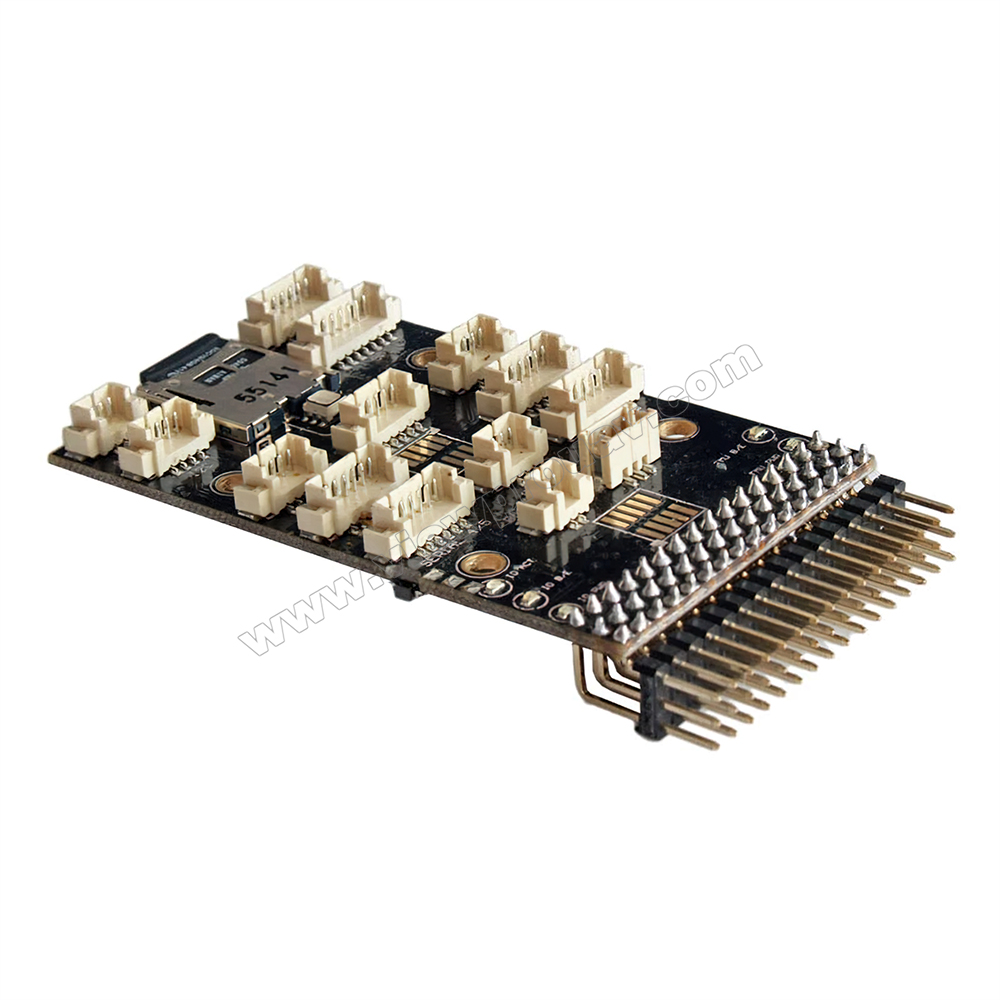



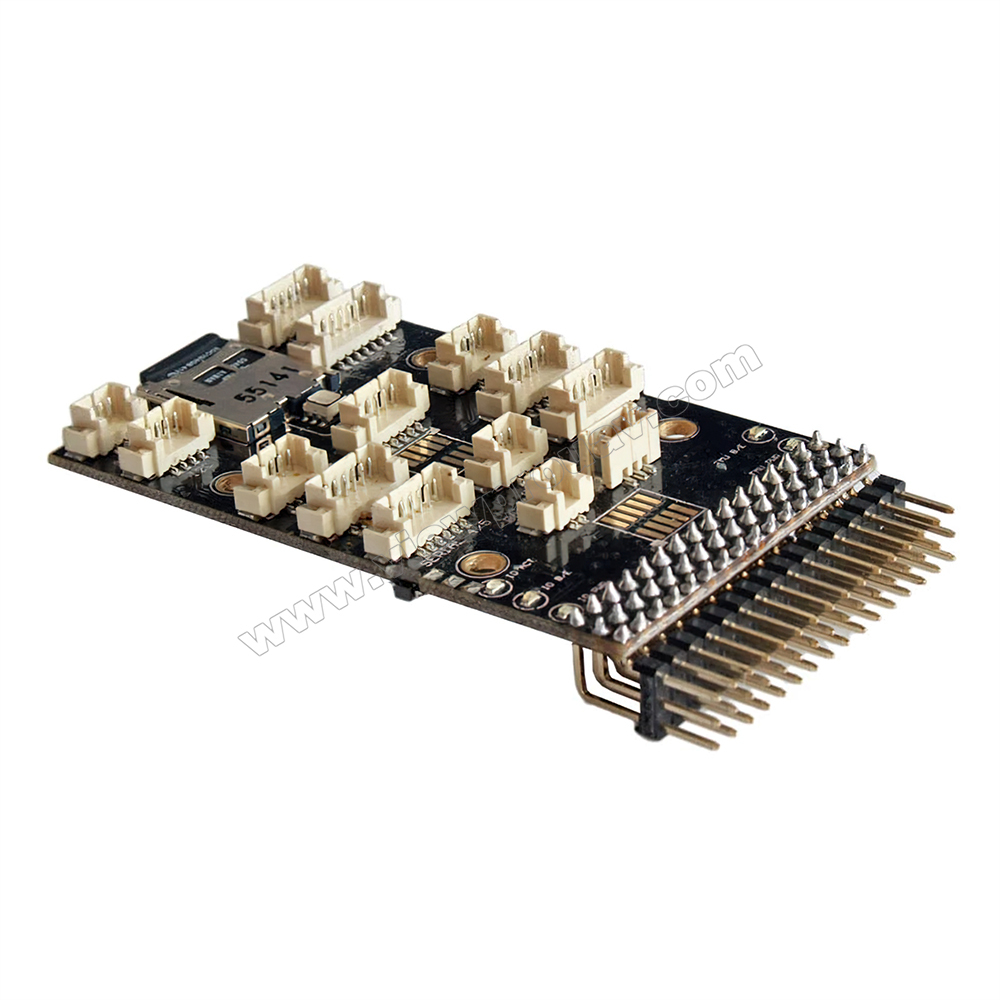



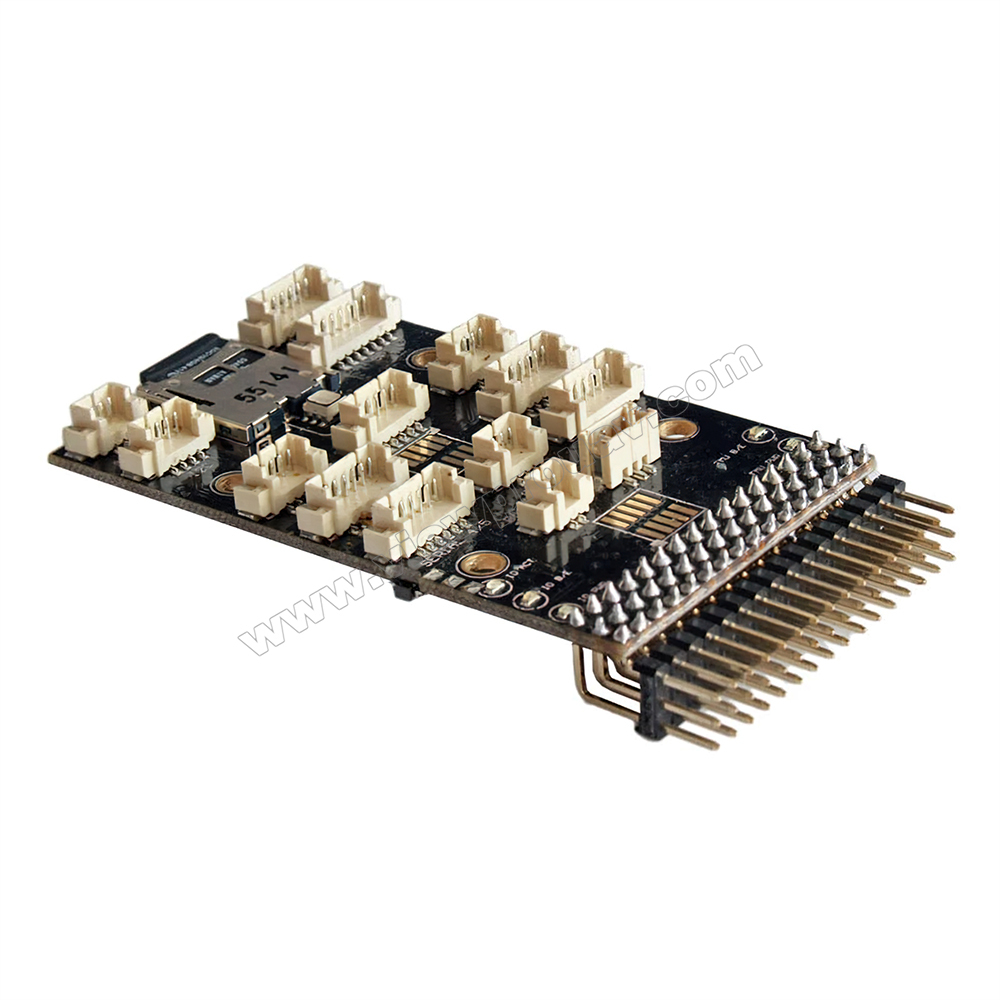

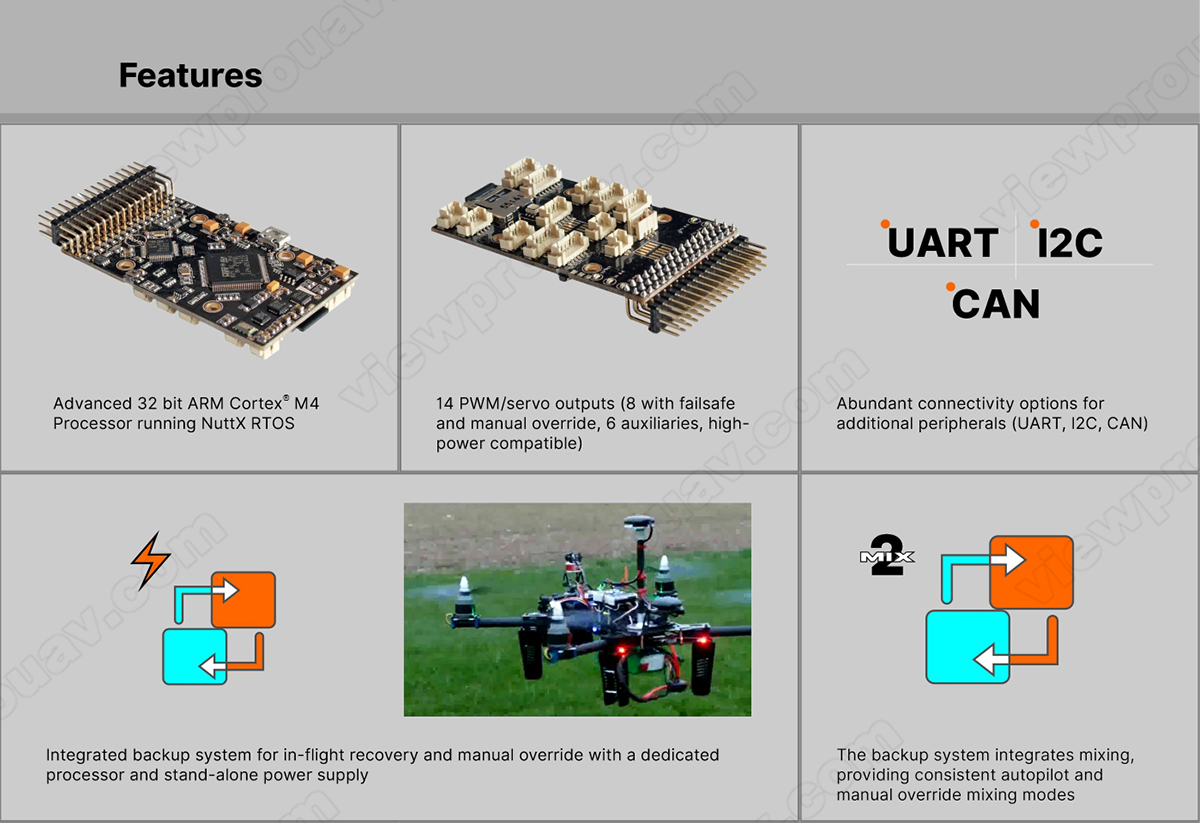
PX4 2.4.8 is newly released by the famous open source flight control hardware manufacturer, which is a new generation of flight control system. It adopts a high-performance 32-bit ARM processor, and all hardware is open source, and the chips and sensors used are disclose. All buses and peripherals are exported, not only compatible with other peripherals, but also more convenient for users with strong development capabilities. The flight control has built-in dual processors, one of which is a powerful 32-bit stm32f427cortex, M4 core 168MHz/256KB RAM/2MB Flash processor; the other is a coprocessor for industrial use: 32bit STM32F103, which runs stably and ensures safe operation.








Product Introduction
Specification
PX4 2.4.8 Autopilot Open Source Flight Controller Specification
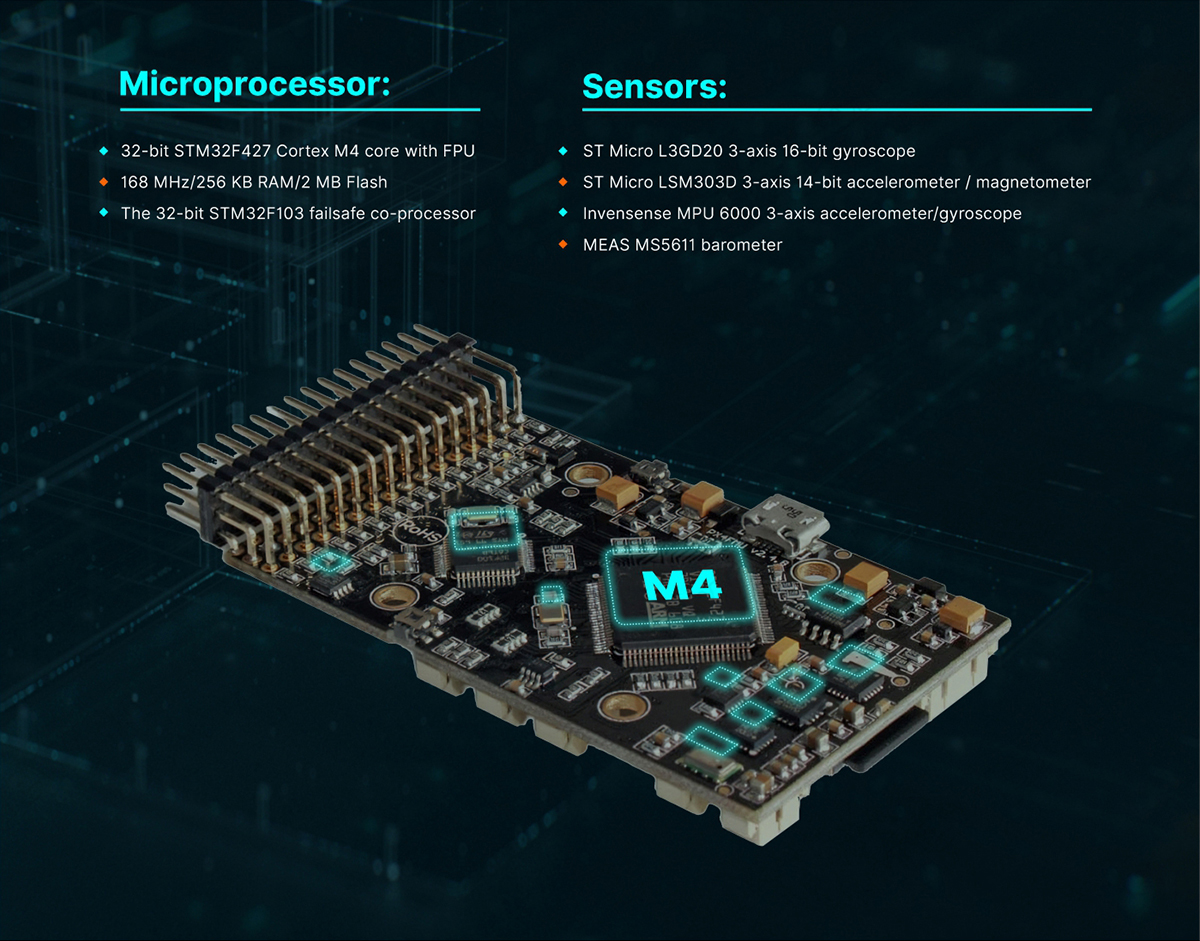
Microprocessor:
- 32-bit STM32F427 Cortex M4 core with FPU
- 168 MHz / 256 KB RAM / 2 MB Flash
- 32-bit STM32F103 failsafe co-processor
Sensors:
- L3GD20 3-axis 16-bit gyroscope
- LSM303D 3-axis 14-bit accelerometer / magnetometer
- MPU 6000 3-axis accelerometer / gyroscope
- 5611 barometer
Interfaces:
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN
- S.BUS input and output
- PPM sum signal
- RSSI (PWM or voltage) input
- I2C
- SPI
- 3.3 and 6.6V ADC inputs
- External micro-USB port
Power System:
- Ideal diode controller with automatic failover
- Servo rail high-power (7 V) and high-current ready
- All peripheral outputs over-current protected, all inputs ESD protected
Weight and Dimensions:
Weight: 38g (1.31oz)
Width: 50mm (1.96")
Thickness: 15.5mm (0.61")
Length: 81.5mm (3.21")
GPS Specifications
Velocity Precision: 0.1 m/s
Max Height: 50,000 m
Max Speed: 515 m/s
Max Acceleration: 4 G
Update Rate: 10 Hz
Time to First Fix: Cold start: 26s, Hot start: 1s
Power supply: voltage DC 5V±5%
Diameter: 54 mm / 2.126 inch
Thickness: 15 mm / 0.59 inch
For more details, please visit PX4 2.4.8 Autopilot Open Source Flight Controller for Drone Developers
-
Product Introduction
-
Specification
PX4 2.4.8 is newly released by the famous open source flight control hardware manufacturer, which is a new generation of flight control system. It adopts a high-performance 32-bit ARM processor, and all hardware is open source, and the chips and sensors used are disclose. All buses and peripherals are exported, not only compatible with other peripherals, but also more convenient for users with strong development capabilities. The flight control has built-in dual processors, one of which is a powerful 32-bit stm32f427cortex, M4 core 168MHz/256KB RAM/2MB Flash processor; the other is a coprocessor for industrial use: 32bit STM32F103, which runs stably and ensures safe operation.
PX4 2.4.8 Autopilot Open Source Flight Controller Specification
Microprocessor:
- 32-bit STM32F427 Cortex M4 core with FPU
- 168 MHz / 256 KB RAM / 2 MB Flash
- 32-bit STM32F103 failsafe co-processor
Sensors:
- L3GD20 3-axis 16-bit gyroscope
- LSM303D 3-axis 14-bit accelerometer / magnetometer
- MPU 6000 3-axis accelerometer / gyroscope
- 5611 barometer
Interfaces:
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN
- S.BUS input and output
- PPM sum signal
- RSSI (PWM or voltage) input
- I2C
- SPI
- 3.3 and 6.6V ADC inputs
- External micro-USB port
Power System:
- Ideal diode controller with automatic failover
- Servo rail high-power (7 V) and high-current ready
- All peripheral outputs over-current protected, all inputs ESD protected
Weight and Dimensions:
Weight: 38g (1.31oz)
Width: 50mm (1.96")
Thickness: 15.5mm (0.61")
Length: 81.5mm (3.21")
GPS Specifications
Velocity Precision: 0.1 m/s
Max Height: 50,000 m
Max Speed: 515 m/s
Max Acceleration: 4 G
Update Rate: 10 Hz
Time to First Fix: Cold start: 26s, Hot start: 1s
Power supply: voltage DC 5V±5%
Diameter: 54 mm / 2.126 inch
Thickness: 15 mm / 0.59 inch
For more details, please visit PX4 2.4.8 Autopilot Open Source Flight Controller for Drone Developers