









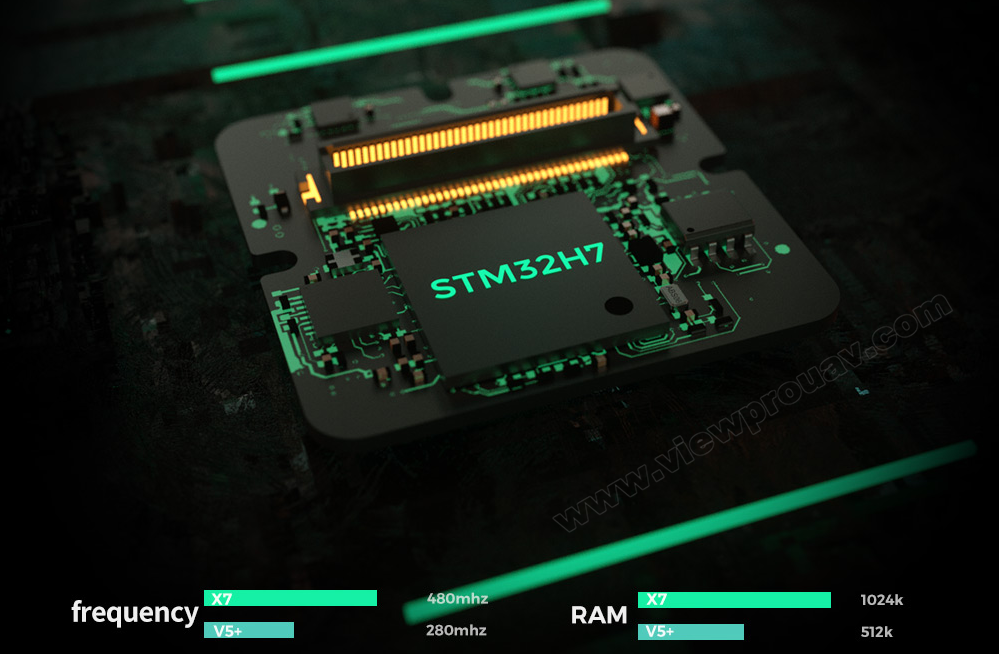
Más rápido que nunca
El piloto automático de la serie X7 utiliza procesadores de la serie STM32H7, la frecuencia de funcionamiento de la CPU aumentó a 480 Mhz, almacenamiento 1024K, FLASH 2048K, tiene un procesador más rápido y un almacenamiento más grande, y utiliza EEPROM de 512K, puede expandir los puntos de referencia a 2048, brinda más imaginación a las aplicaciones de vuelo
Adáptese a entornos hostiles
El piloto automático de la serie x7 adopta una gran cantidad de chips a nivel de automóvil y tiene un sistema de compensación de temperatura de sensor de alta precisión incorporado, que hace que el sensor funcione a una temperatura constante para garantizar que el sensor pueda operar con alta precisión y alta sensibilidad en entornos de alta y baja temperatura.
Siempre estable
Se utilizan sensores de la serie Invensense + Bosch + ADI + TE, que tienen menos ruido y son más fuertes Rendimiento antichoque y vibración. Con la brújula de grado industrial RM3100, la estabilidad de vuelo y el rendimiento antiinterferencia han traído una mejora cualitativa.

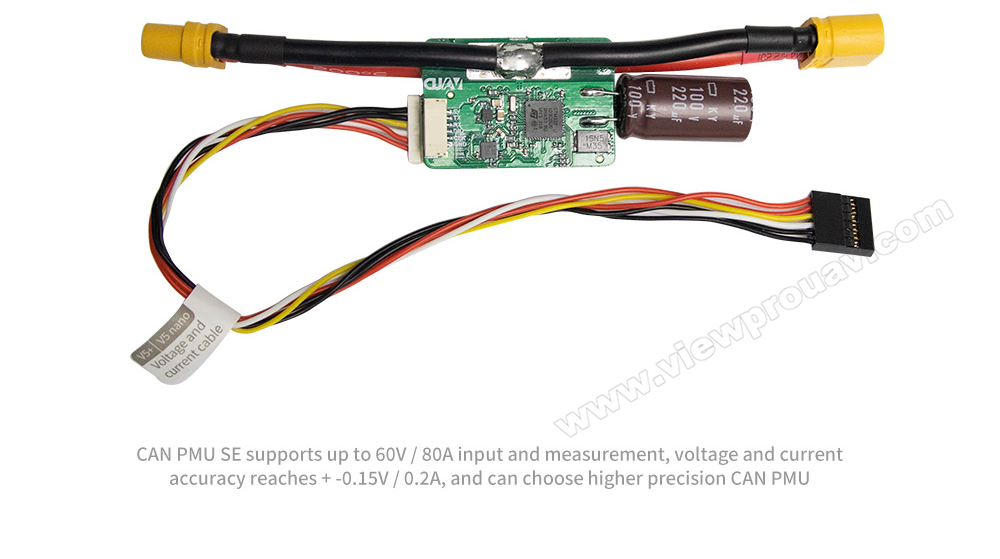
Lista de empaque estándar con módulo de potencia digital
La lista de empaque predeterminada incluye el módulo de detección de potencia digital PMU-SE digital con protocolo UAVCAN, algoritmo ITT desarrollado por CUAV incorporado, que ayuda a medir con precisión el voltaje y la corriente en tiempo real del UAV y hace que la estimación del tiempo de vuelo sea más confiable.
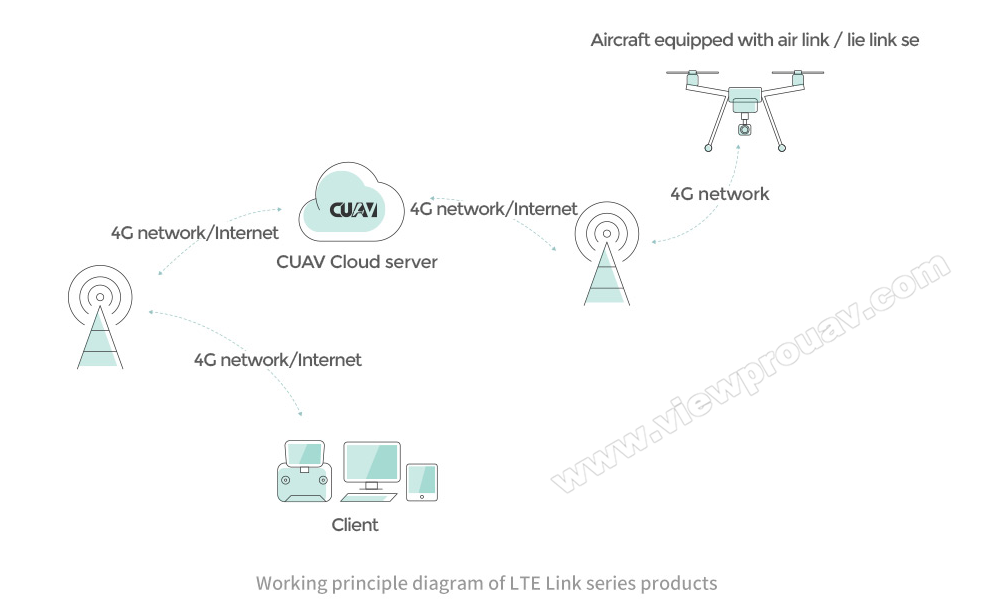
Opcional: Enlace LTE de hardware de acceso a la nube CUAV
Todas las series CUAV de piloto automático admiten la serie LTE Link de enlaces de comunicación de la plataforma en la nube Lei Xun. EspañolSe comunican a través de redes 4G y 5G, controlan sin distancia, admiten transmisión de video de alta definición en tiempo real y uso compartido de video, y admiten asignación de permisos y funciones de administración de equipos de drones.
Protocolo UAVCAN
Protocolo estándar UAVCAN, alto
tiempo real, fuerte antiinterferencia
Barómetro incorporado de alta precisión
Barómetro incorporado de alta precisión para satisfacer las necesidades de diferentes escenarios de aplicación

NEO V2 Pro adopta el diseño de filtrado dual SAW + LNA + SAW, que evita eficazmente la influencia del control remoto, la transmisión digital y las señales 4G en la recepción de posicionamiento GpS.

Programa de código abierto, admite programas personalizados