
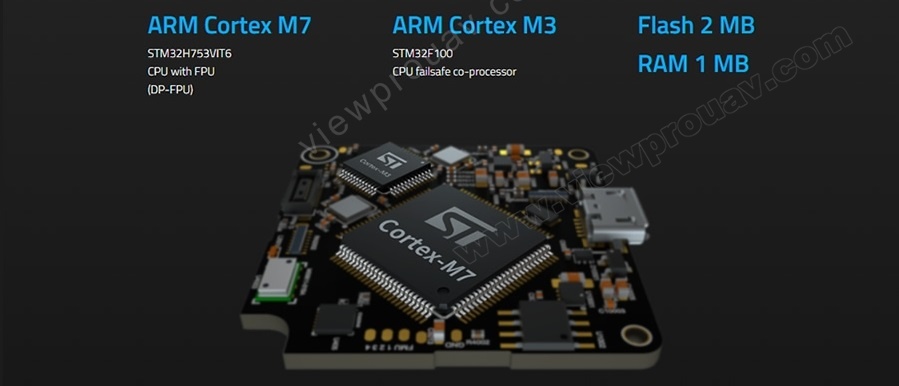
Equipado con procesador H7 de alto rendimiento
El H7 tiene una FPU de doble precisión (DP), 1 MB de RAM y un procesador de CPU de 400 MHz que proporciona un alto rendimiento, un funcionamiento extremadamente rápido y una solución estable para el vuelo.
Conocimiento de la situación mediante ADS-B integrado
Se ha integrado un receptor ADS-B personalizado de 1090 MHz de uAvionix en la nueva placa portadora ADS-B. Esto proporciona una nueva función sin incremento de tamaño. Los UAV equipados con la nueva placa portadora pueden recibir la actitud de aeronaves comerciales tripuladas dentro del rango de salida ADS-B. Esto informa de manera efectiva al operador del UAS para permitirle evaluar los riesgos de su operación actual.

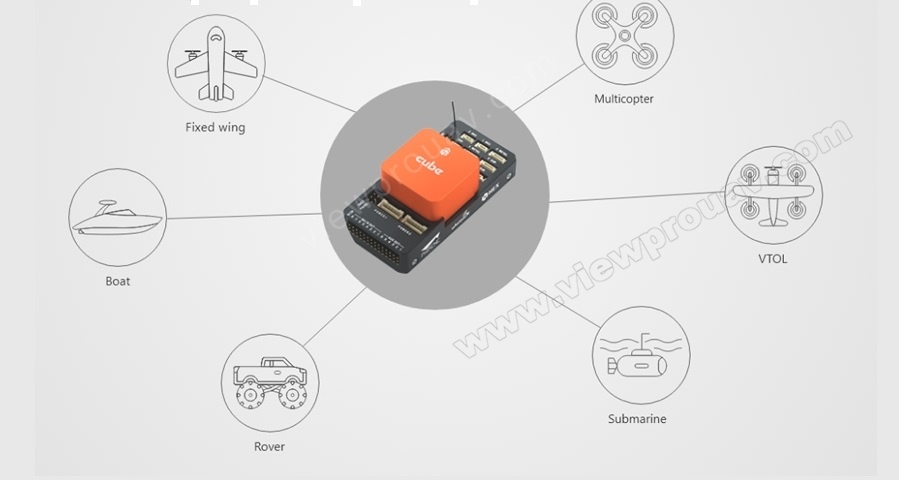
Compatibilidad con múltiples tipos de vehículos
Incluyendo helicóptero, helicóptero, ala fija, VTOL, Rover, barco, submarino, etc.
Sistema IMU triplemente redundante
Incluye sensores mejorados que proporcionan un sistema más confiable y seguro.

Fácil conmutación del voltaje de la señal de salida PWM
La salida PWM admite la conmutación entre niveles de señal de 3,3 V y 5 V. La conmutación de voltaje se puede realizar mediante el software de la estación de control terrestre. Esto mejora la compatibilidad con varios periféricos externos.