



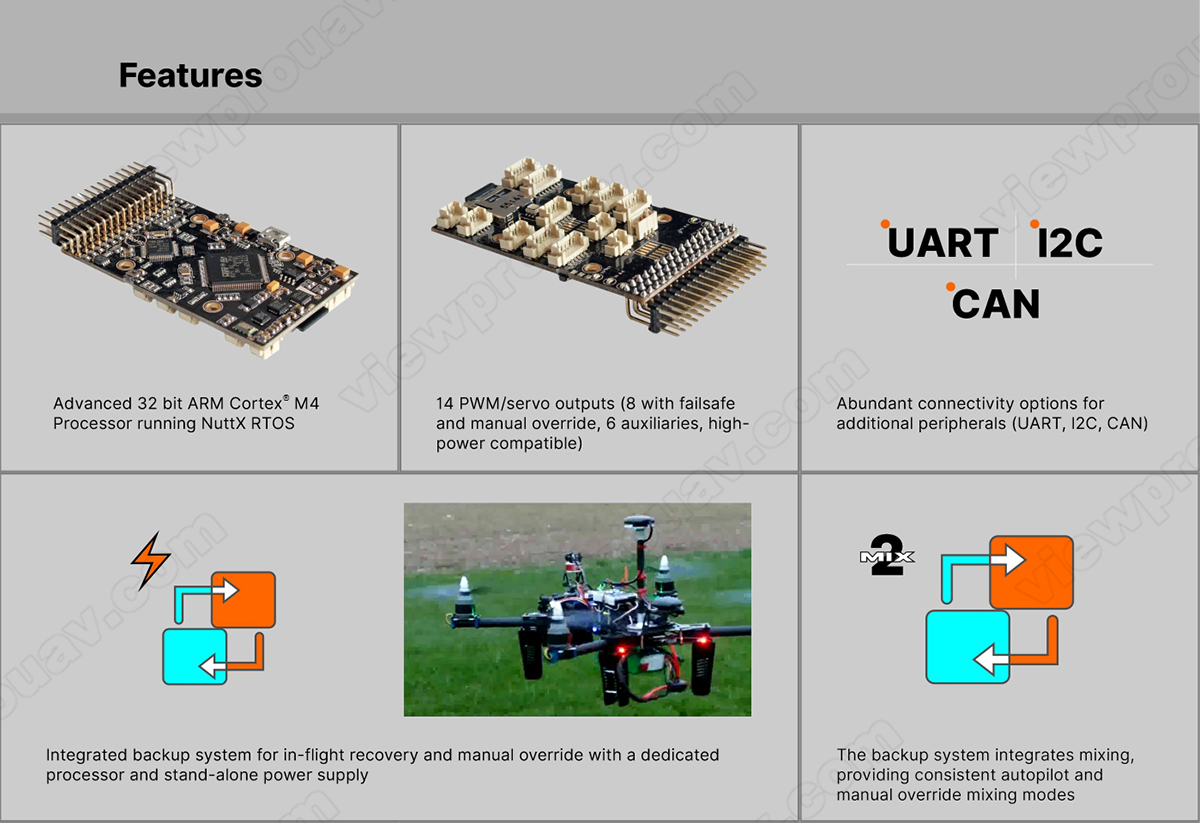
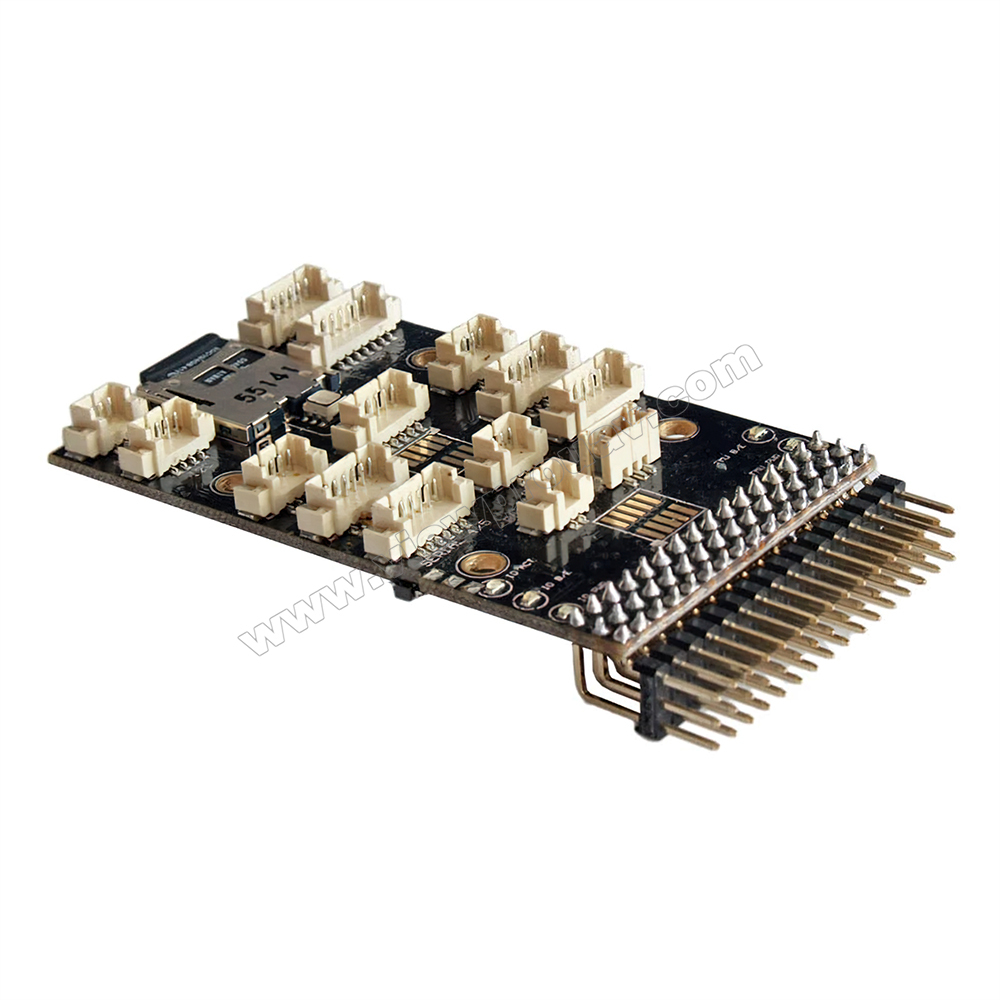
PX4 2.4.8 es un nuevo lanzamiento del famoso fabricante de hardware de control de vuelo de código abierto, que es una nueva generación de sistema de control de vuelo. Adopta un procesador ARM de 32 bits de alto rendimiento, y todo el hardware es de código abierto, y los chips y sensores utilizados son divulgados. Todos los buses y periféricos se exportan, no solo son compatibles con otros periféricos, sino que también son más convenientes para los usuarios con fuertes capacidades de desarrollo. El control de vuelo tiene procesadores duales integrados, uno de los cuales es un potente procesador stm32f427cortex de 32 bits, núcleo M4 de 168 MHz/256 KB de RAM/2 MB de Flash; el otro es un coprocesador para uso industrial: STM32F103 de 32 bits, que funciona de manera estable y garantiza un funcionamiento seguro.














Introducción del producto
Especificación
Especificación del controlador de vuelo de código abierto con piloto automático PX4 2.4.8
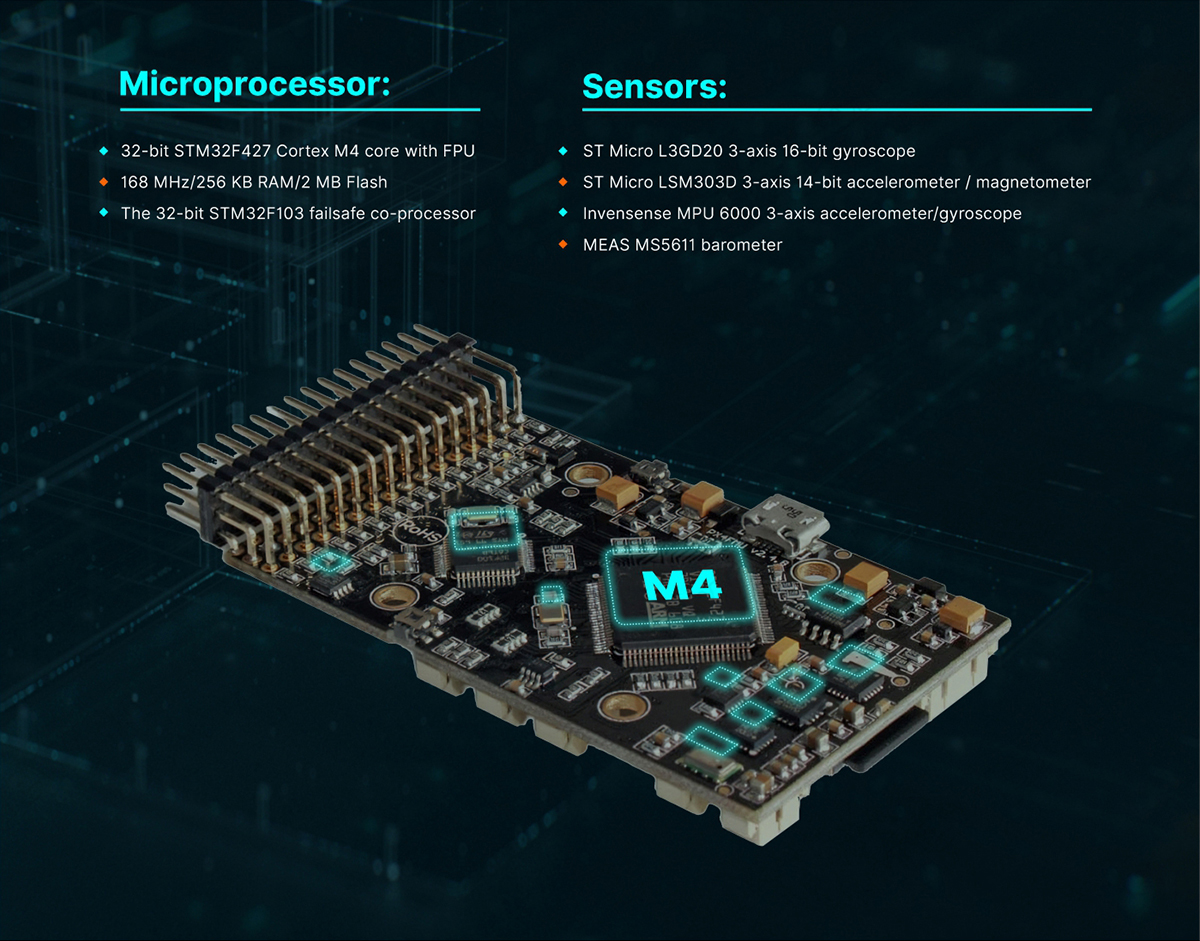
Microprocesador:
- Núcleo STM32F427 Cortex M4 de 32 bits con FPU
- 168 MHz / 256 KB RAM / 2 MB Flash
- Coprocesador a prueba de fallos STM32F103 de 32 bits
Sensores:
- Giroscopio L3GD20 de 3 ejes y 16 bits
- Acelerómetro/magnetómetro LSM303D de 3 ejes y 14 bits
- Acelerómetro/giroscopio MPU 6000 de 3 ejes
- Barómetro 5611
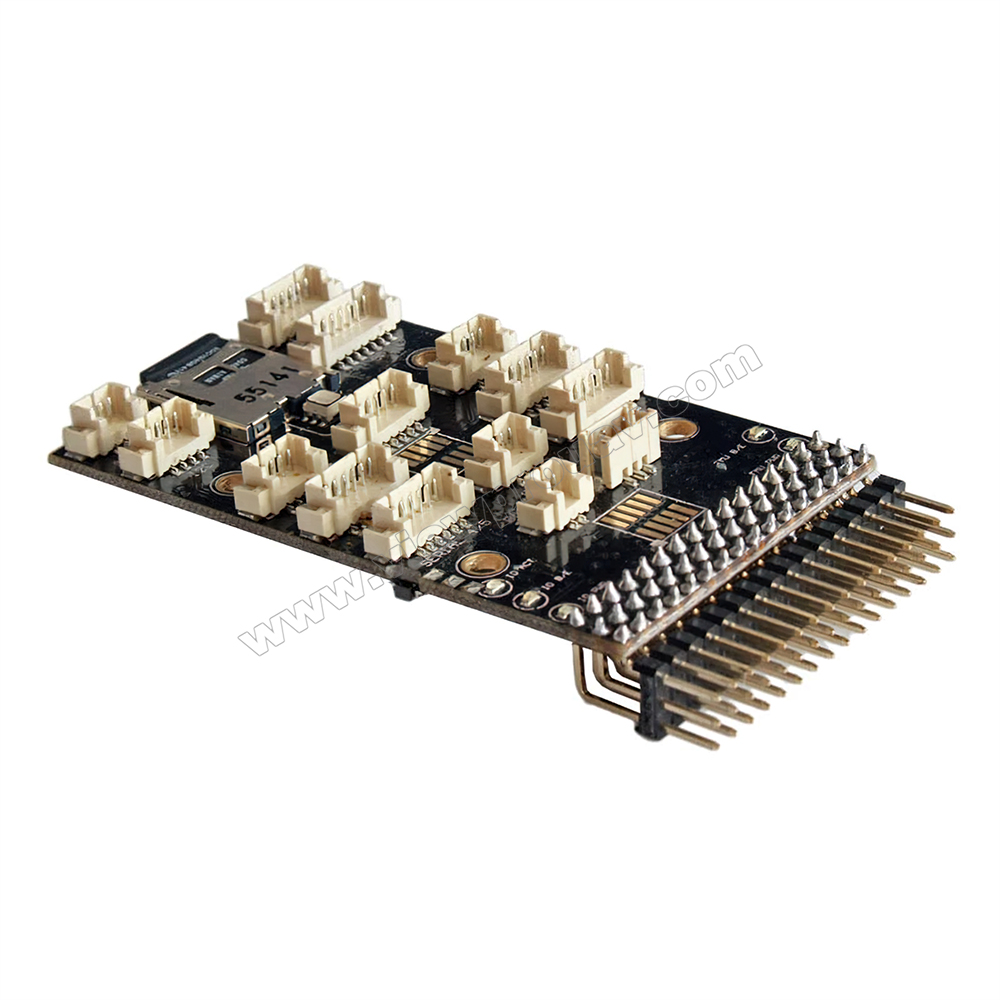
Interfaces:
- 5x UART (puertos serie), uno con capacidad de alta potencia, 2x con control de flujo HW
- 2x CAN
- Entrada y salida S.BUS
- Señal de suma PPM
- Entrada RSSI (PWM o voltaje)
- I2C
- SPI
- Entradas ADC de 3,3 y 6,6 V
- Puerto micro-USB externo
Sistema de alimentación:
- Controlador de diodos ideal con conmutación por error automática
- Servocarril de alta potencia (7 V) y alta corriente listo
- Todas las salidas periféricas protegidas contra sobrecorriente, todas las entradas protegidas contra ESD
Peso y dimensiones:
Peso: 38 g (1,31 oz)
Ancho: 50 mm (1,96")
Grosor: 15,5 mm (0,61")
Longitud: 81,5 mm (3,21")
Especificaciones del GPS
Precisión de velocidad: 0,1 m/s
Altura máxima: 50 000 m
Velocidad máxima: 515 m/s
Aceleración máxima: 4 G
Frecuencia de actualización: 10 Hz
Tiempo hasta la primera corrección: arranque en frío: 26 s, arranque en caliente: 1 s
Fuente de alimentación: voltaje CC 5 V ± 5 %
Diámetro: 54 mm/2,126 pulgadas
Grosor: 15 mm/0,59 pulgadas
Para obtener más detalles, visite PX4 2.4.8 Controlador de vuelo de código abierto con piloto automático para desarrolladores de drones
-
Introducción del producto
-
Especificación
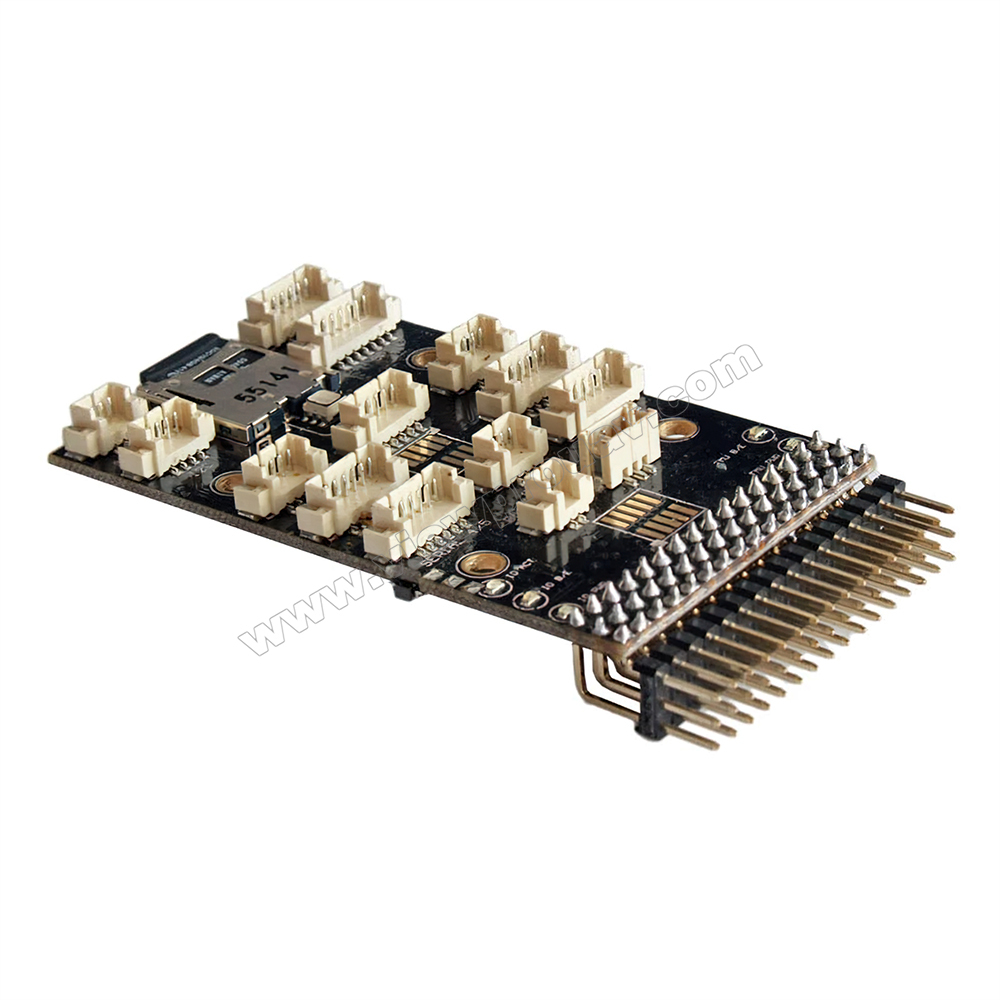
PX4 2.4.8 es un nuevo lanzamiento del famoso fabricante de hardware de control de vuelo de código abierto, que es una nueva generación de sistema de control de vuelo. Adopta un procesador ARM de 32 bits de alto rendimiento, y todo el hardware es de código abierto, y los chips y sensores utilizados son divulgados. Todos los buses y periféricos se exportan, no solo son compatibles con otros periféricos, sino que también son más convenientes para los usuarios con fuertes capacidades de desarrollo. El control de vuelo tiene procesadores duales integrados, uno de los cuales es un potente procesador stm32f427cortex de 32 bits, núcleo M4 de 168 MHz/256 KB de RAM/2 MB de Flash; el otro es un coprocesador para uso industrial: STM32F103 de 32 bits, que funciona de manera estable y garantiza un funcionamiento seguro.
Especificación del controlador de vuelo de código abierto con piloto automático PX4 2.4.8
Microprocesador:
- Núcleo STM32F427 Cortex M4 de 32 bits con FPU
- 168 MHz / 256 KB RAM / 2 MB Flash
- Coprocesador a prueba de fallos STM32F103 de 32 bits
Sensores:
- Giroscopio L3GD20 de 3 ejes y 16 bits
- Acelerómetro/magnetómetro LSM303D de 3 ejes y 14 bits
- Acelerómetro/giroscopio MPU 6000 de 3 ejes
- Barómetro 5611
Interfaces:
- 5x UART (puertos serie), uno con capacidad de alta potencia, 2x con control de flujo HW
- 2x CAN
- Entrada y salida S.BUS
- Señal de suma PPM
- Entrada RSSI (PWM o voltaje)
- I2C
- SPI
- Entradas ADC de 3,3 y 6,6 V
- Puerto micro-USB externo
Sistema de alimentación:
- Controlador de diodos ideal con conmutación por error automática
- Servocarril de alta potencia (7 V) y alta corriente listo
- Todas las salidas periféricas protegidas contra sobrecorriente, todas las entradas protegidas contra ESD
Peso y dimensiones:
Peso: 38 g (1,31 oz)
Ancho: 50 mm (1,96")
Grosor: 15,5 mm (0,61")
Longitud: 81,5 mm (3,21")
Especificaciones del GPS
Precisión de velocidad: 0,1 m/s
Altura máxima: 50 000 m
Velocidad máxima: 515 m/s
Aceleración máxima: 4 G
Frecuencia de actualización: 10 Hz
Tiempo hasta la primera corrección: arranque en frío: 26 s, arranque en caliente: 1 s
Fuente de alimentación: voltaje CC 5 V ± 5 %
Diámetro: 54 mm/2,126 pulgadas
Grosor: 15 mm/0,59 pulgadas
Para obtener más detalles, visite PX4 2.4.8 Controlador de vuelo de código abierto con piloto automático para desarrolladores de drones