









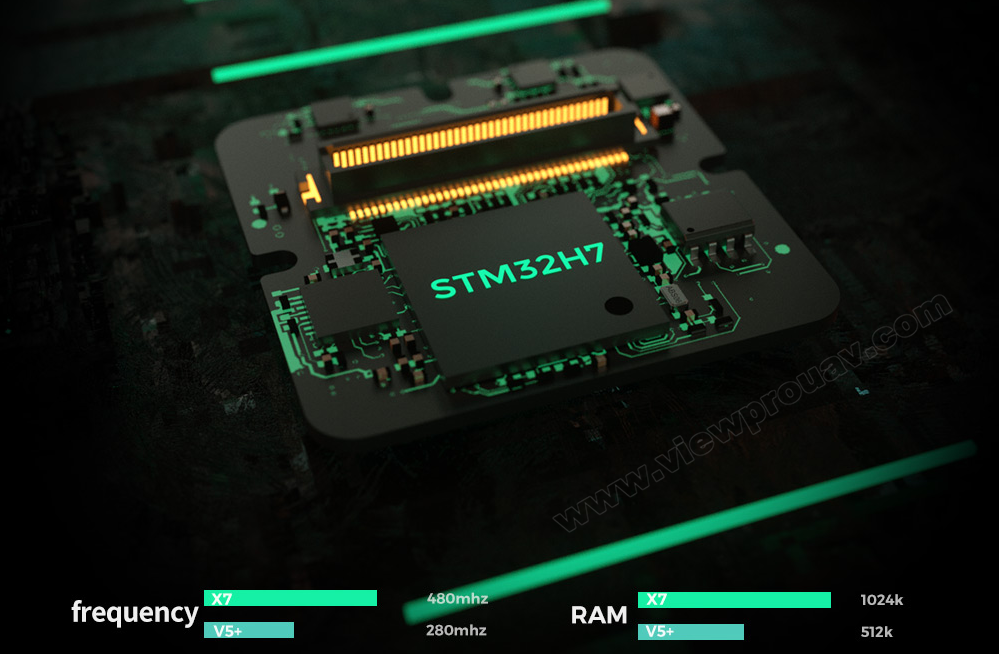
Plus rapide que jamais
Le pilote automatique de la série X7 utilise des processeurs de la série STM32H7, la fréquence de fonctionnement du processeur augmentée à 480 MHz, le stockage 1024K, FLASH 2048K, dispose d'un processeur plus rapide et d'un stockage plus grand, et utilise 512K EEPROM, peut étendre les points de cheminement jusqu'à 2048, apporte plus d'imagination aux applications de vol
S'adapter à un environnement difficile
Le pilote automatique de la série x7 adopte un grand nombre de puces de niveau automobile et dispose d'un système de compensation de température de capteur de haute précision intégré, qui permet au capteur de fonctionner à une température constante pour garantir que le capteur peut fonctionner avec une grande précision et une grande sensibilité dans des environnements à haute et basse température.
Toujours stable
Les capteurs de la série Invensense + Bosch + ADI + TE sont utilisés, qui ont un bruit plus faible et des performances antichoc et antivibratoires plus fortes. Avec la boussole de qualité industrielle RM3100, la stabilité de vol et les performances anti-interférences ont apporté une amélioration qualitative

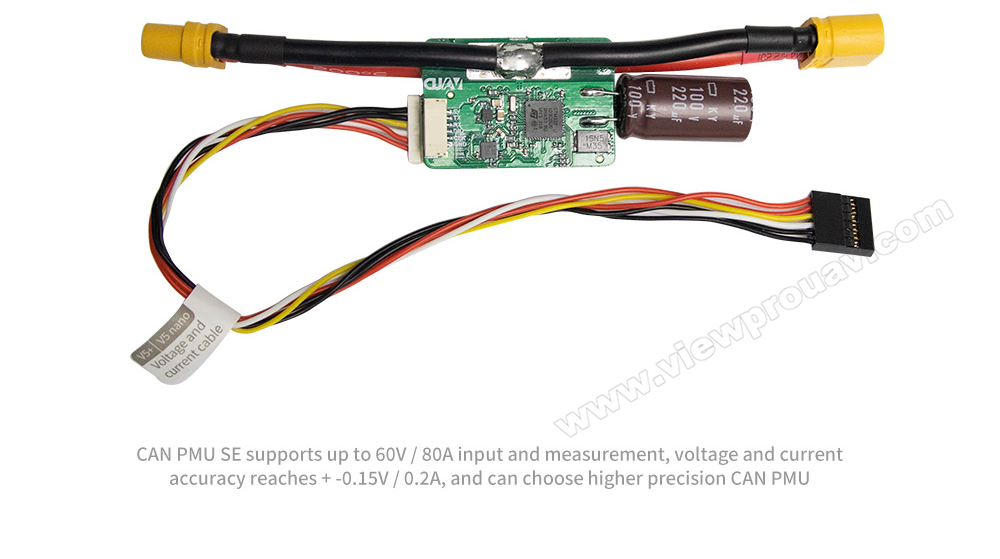
Liste de colisage standard avec module d'alimentation numérique
La liste d'emballage par défaut comprend le module de détection de puissance numérique PMU-SE du protocole UAVCAN, l'algorithme ITT auto-développé CUAV intégré, qui aide à mesurer avec précision la tension et le courant en temps réel du drone et rend l'estimation du temps de vol plus fiable.
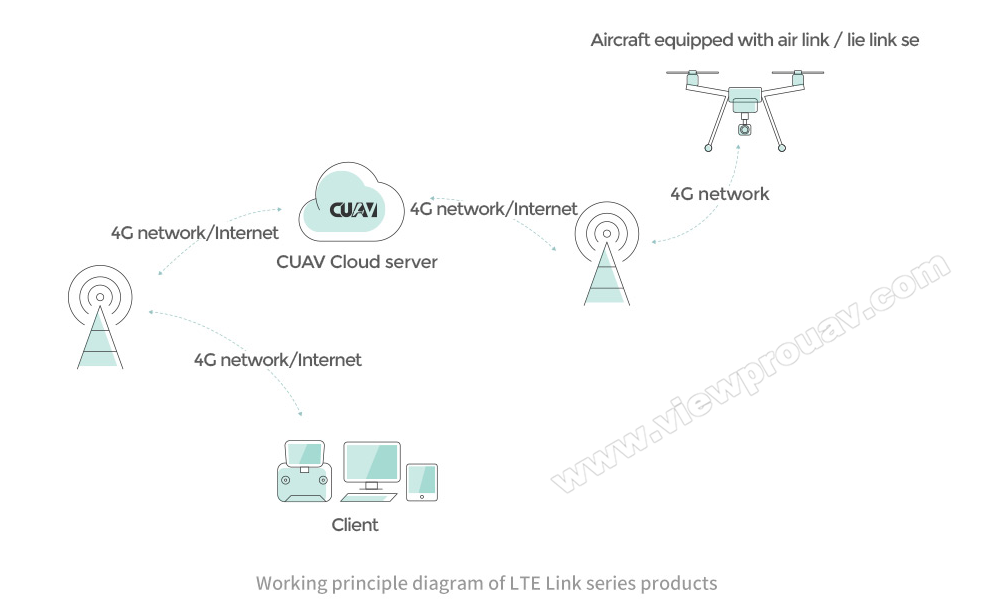
En option : matériel d'accès au cloud CUAV, liaison LTE
Toutes les séries de pilotes automatiques CUAV prennent en charge la série de liaisons de communication LTE Link de la plate-forme cloud Lei Xun. Ils communiquent via les réseaux 4G et 5G, contrôlent sans distance, prennent en charge la transmission vidéo haute définition en temps réel et le partage de vidéos, et prennent en charge les fonctions d'attribution d'autorisations et de gestion d'équipe de drones.
Protocole UAVCAN
Protocole standard UAVCAN, haut
en temps réel, anti-interférence puissant
Baromètre de haute précision intégré
Baromètre de haute précision intégré pour répondre aux besoins de différents scénarios d'application

NEO V2 Pro adopte une conception de filtrage double SAW + LNA + SAW, qui évite efficacement l'influence de la télécommande, de la transmission numérique et des signaux 4G sur la réception du positionnement GPS.

Programme open source, prend en charge les programmes personnalisés