
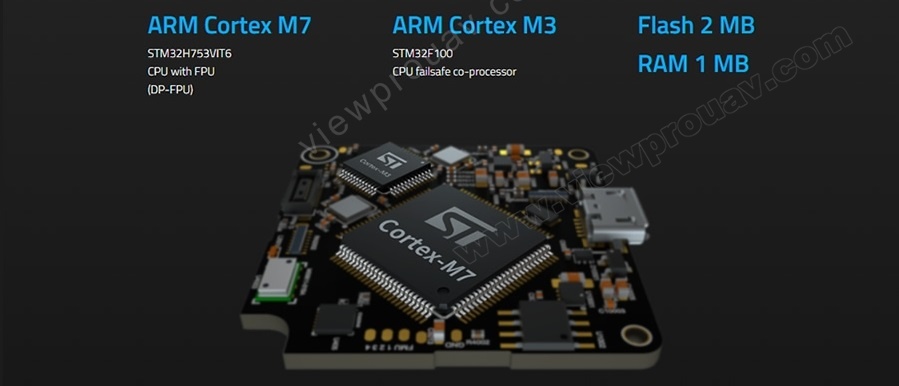
Équipé d'un processeur H7 hautes performances
Le H7 dispose d'un FPU double précision (DP), de 1 Mo de RAM et d'un processeur CPU 40 OMHz offrant des performances élevées, un fonctionnement extrêmement rapide et une solution stable pour le vol.
Connaissance de la situation grâce à l'ADS-B intégré
Un récepteur ADS-B personnalisé de 1090 MHz d'uAvionix a été intégré dans la nouvelle carte porteuse ADS-B. Cela offre de nouvelles fonctions sans augmentation de taille. Les drones équipés de la nouvelle carte porteuse peuvent recevoir l'attitude des avions commerciaux habités dans la portée de sortie ADS-B. Cela informe efficacement l'opérateur du drone pour lui permettre d'évaluer les risques liés à son opération actuelle.

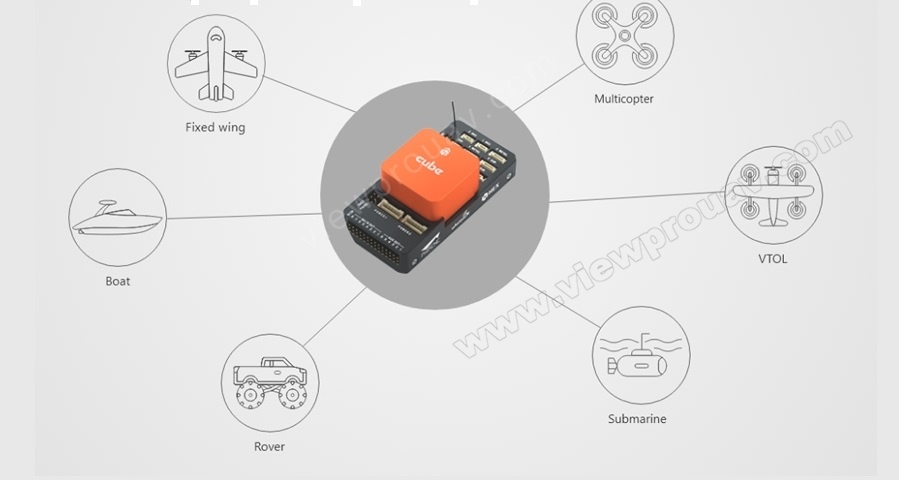
Prise en charge de plusieurs types de véhicules
Y compris hélicoptère, drone, voilure fixe, VTOL, Rover, bateau, sous-marin, etc.
Système IMU triplement redondant
Équipé de capteurs améliorés offrant un système plus fiable et plus sûr.

Commutation facile de la tension du signal de sortie PWM
La sortie PWM prend en charge la commutation entre les niveaux de signal 3,3 V et 5 V. La commutation de tension peut être effectuée par le logiciel de la station de contrôle au sol. Cela améliore la compatibilité avec divers périphériques externes.