


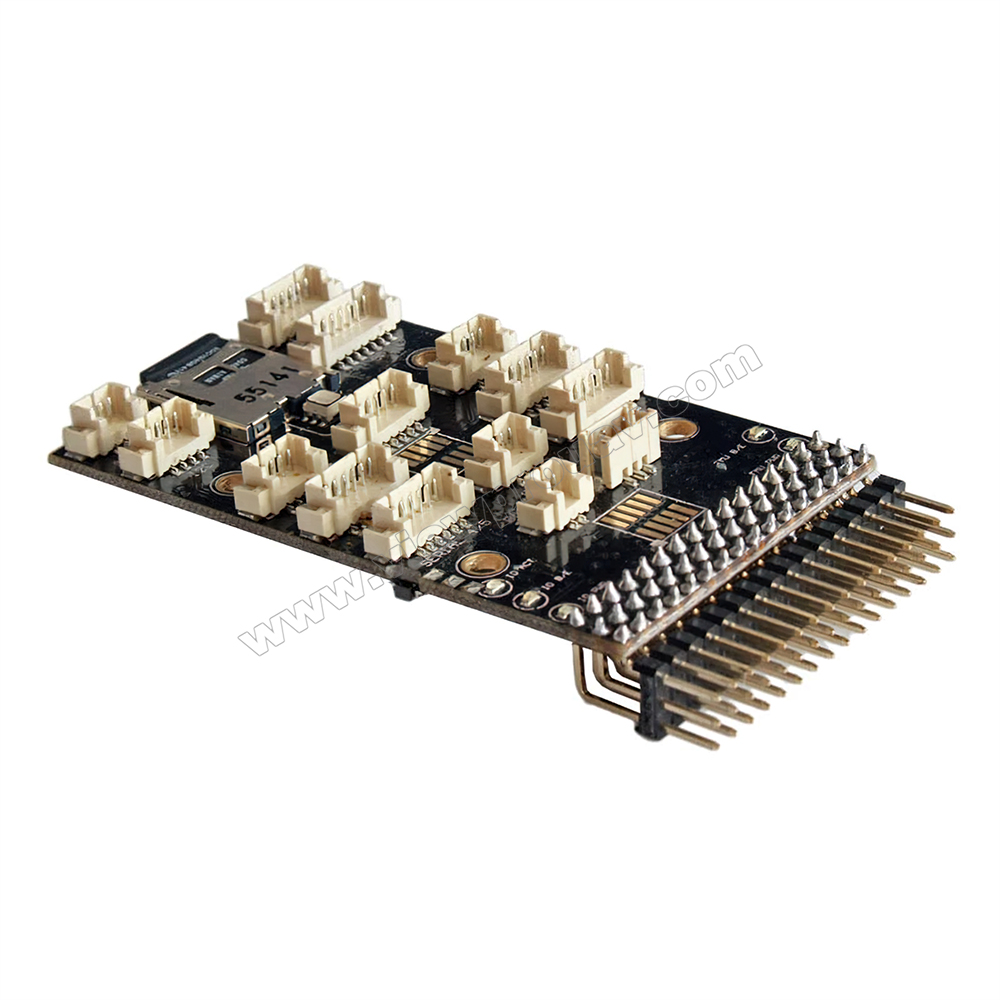







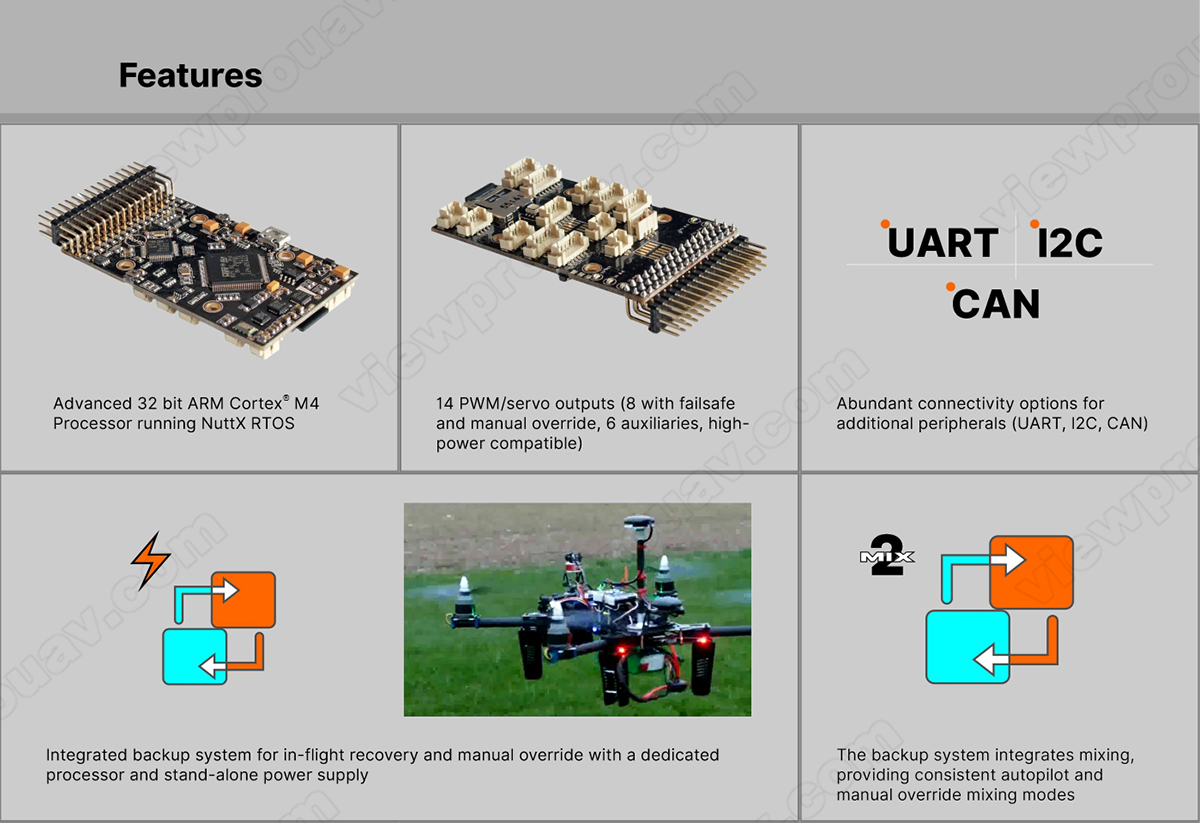
PX4 2.4.8 est une nouvelle version publiée par le célèbre fabricant de matériel de contrôle de vol open source, qui est une nouvelle génération de système de contrôle de vol. Il adopte un processeur ARM 32 bits hautes performances, et tout le matériel est open source, et les puces et capteurs utilisés sont divulgués. Tous les bus et périphériques sont exportés, non seulement compatibles avec d'autres périphériques, mais aussi plus pratiques pour les utilisateurs ayant de fortes capacités de développement. Le contrôle de vol dispose de deux processeurs intégrés, dont l'un est un puissant processeur 32 bits stm32f427cortex, M4 core 168MHz/256KB RAM/2MB Flash ; l'autre est un coprocesseur à usage industriel : 32 bits STM32F103, qui fonctionne de manière stable et garantit un fonctionnement sûr.








Présentation du produit
Spécification
Spécifications du contrôleur de vol Open Source du pilote automatique PX4 2.4.8
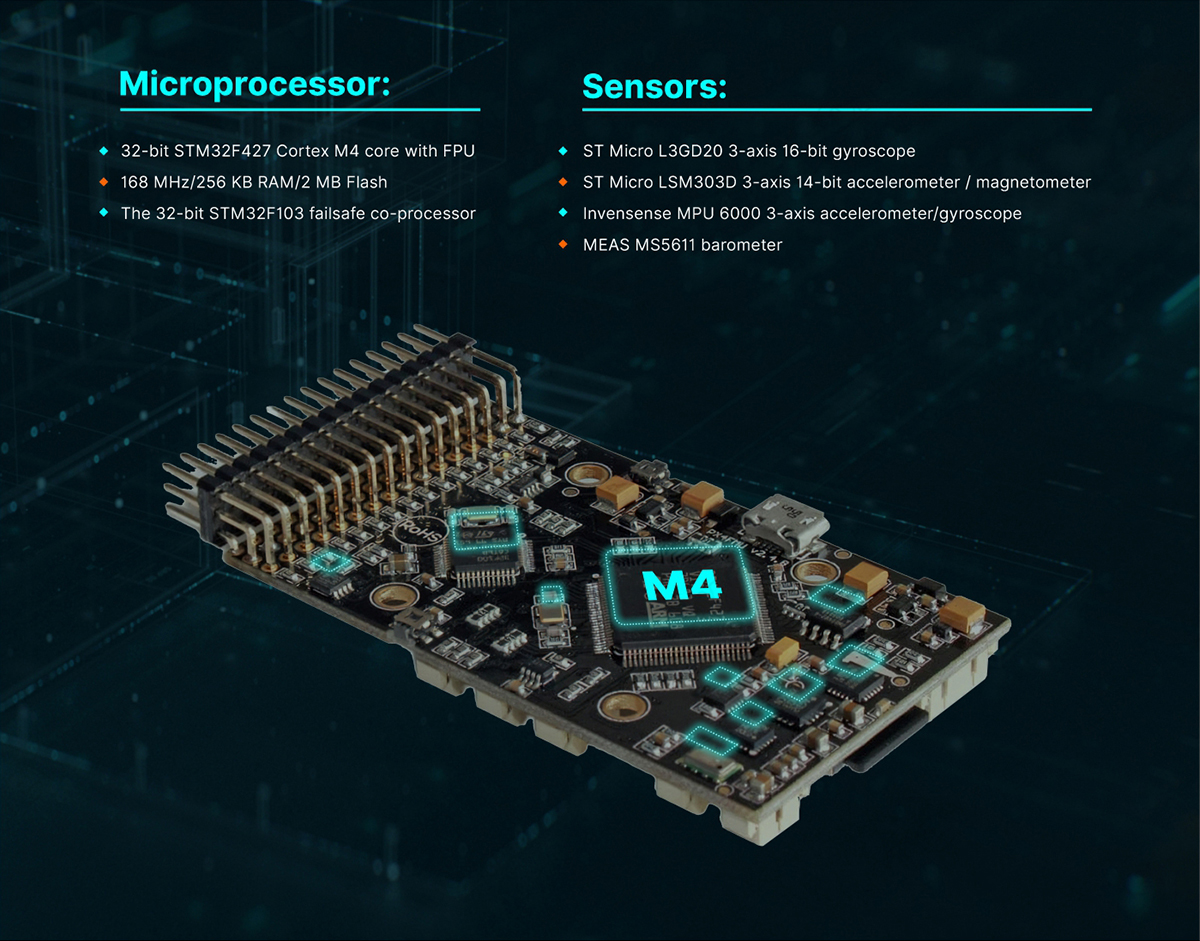
Microprocesseur:
- Noyau Cortex M4 STM32F427 32 bits avec FPU
- 168 MHz / 256 Ko de RAM / 2 Mo de mémoire Flash
- Coprocesseur de sécurité STM32F103 32 bits
Capteurs:
- Gyroscope 3 axes 16 bits L3GD20
- Accéléromètre / magnétomètre 3 axes 14 bits LSM303D
- Accéléromètre / gyroscope 3 axes MPU 6000
- Baromètre 5611
Interfaces :
- 5x UART (ports série), un capable de haute puissance, 2x avec contrôle de flux HW
- 2x PEUT
- Entrée et sortie S.BUS
- Signal de somme PPM
- Entrée RSSI (PWM ou tension)
- I2C
-SPI
- Entrées ADC 3,3 et 6,6 V
- Port micro-USB externe
Système d'alimentation :
- Contrôleur de diode idéal avec basculement automatique
- Rail servo haute puissance (7 V) et haute intensité prêt
- Toutes les sorties périphériques sont protégées contre les surintensités, toutes les entrées sont protégées contre les décharges électrostatiques
Poids et dimensions :
Poids : 38 g (1,31 oz)
Largeur : 50 mm (1,96")
Épaisseur : 15,5 mm (0,61")
Longueur : 81,5 mm (3,21")
Spécifications GPS
Précision de la vitesse : 0,1 m/s
Altitude maximale : 50 000 m
Vitesse maximale : 515 m/s
Accélération maximale : 4 G
Taux de mise à jour : 10 Hz
Temps de première réparation : démarrage à froid : 26 s, démarrage à chaud : 1 s
Alimentation : tension DC 5V±5%
Diamètre : 54 mm / 2,126 pouces
Épaisseur : 15 mm / 0,59 pouce
Pour plus de détails, veuillez visiter PX4 2.4.8 Autopilot Open Source Flight Controller pour les développeurs de drones
-
Présentation du produit
-
Spécification
PX4 2.4.8 est une nouvelle version publiée par le célèbre fabricant de matériel de contrôle de vol open source, qui est une nouvelle génération de système de contrôle de vol. Il adopte un processeur ARM 32 bits hautes performances, et tout le matériel est open source, et les puces et capteurs utilisés sont divulgués. Tous les bus et périphériques sont exportés, non seulement compatibles avec d'autres périphériques, mais aussi plus pratiques pour les utilisateurs ayant de fortes capacités de développement. Le contrôle de vol dispose de deux processeurs intégrés, dont l'un est un puissant processeur 32 bits stm32f427cortex, M4 core 168MHz/256KB RAM/2MB Flash ; l'autre est un coprocesseur à usage industriel : 32 bits STM32F103, qui fonctionne de manière stable et garantit un fonctionnement sûr.
Spécifications du contrôleur de vol Open Source du pilote automatique PX4 2.4.8
Microprocesseur:
- Noyau Cortex M4 STM32F427 32 bits avec FPU
- 168 MHz / 256 Ko de RAM / 2 Mo de mémoire Flash
- Coprocesseur de sécurité STM32F103 32 bits
Capteurs:
- Gyroscope 3 axes 16 bits L3GD20
- Accéléromètre / magnétomètre 3 axes 14 bits LSM303D
- Accéléromètre / gyroscope 3 axes MPU 6000
- Baromètre 5611
Interfaces :
- 5x UART (ports série), un capable de haute puissance, 2x avec contrôle de flux HW
- 2x PEUT
- Entrée et sortie S.BUS
- Signal de somme PPM
- Entrée RSSI (PWM ou tension)
- I2C
-SPI
- Entrées ADC 3,3 et 6,6 V
- Port micro-USB externe
Système d'alimentation :
- Contrôleur de diode idéal avec basculement automatique
- Rail servo haute puissance (7 V) et haute intensité prêt
- Toutes les sorties périphériques sont protégées contre les surintensités, toutes les entrées sont protégées contre les décharges électrostatiques
Poids et dimensions :
Poids : 38 g (1,31 oz)
Largeur : 50 mm (1,96")
Épaisseur : 15,5 mm (0,61")
Longueur : 81,5 mm (3,21")
Spécifications GPS
Précision de la vitesse : 0,1 m/s
Altitude maximale : 50 000 m
Vitesse maximale : 515 m/s
Accélération maximale : 4 G
Taux de mise à jour : 10 Hz
Temps de première réparation : démarrage à froid : 26 s, démarrage à chaud : 1 s
Alimentation : tension DC 5V±5%
Diamètre : 54 mm / 2,126 pouces
Épaisseur : 15 mm / 0,59 pouce
Pour plus de détails, veuillez visiter PX4 2.4.8 Autopilot Open Source Flight Controller pour les développeurs de drones