7. प्रश्न: जब फिक्स्ड विंग बहुत तेजी से मुड़ता है तो जिम्बल के रोल अक्ष झुकाव की समस्या को हल करने के लिए ओपन सोर्स फ्लाइट कंट्रोल कैसे स्थापित करें?
उत्तर:
उच्च गतिशील उड़ान के दौरान क्षितिज विचलन की क्षतिपूर्ति के लिए जिम्बल सीरियल पोर्ट को ओपन सोर्स फ्लाइट कंट्रोल (जैसे: पिक्सहॉक) के TELEM से कनेक्ट करें।
FC TELEM पोर्ट पैरामीटर सेटिंग्स: बॉड दर 115200, MAvlink1.
ArduPilot में पैरामीटर सेट करें:
•सीरियलx_BAUD = 115
•सीरियलx_प्रोटोकॉल = 1
जहाँ “x” पोर्ट संख्या है। मान 1 (Mavlink) है।
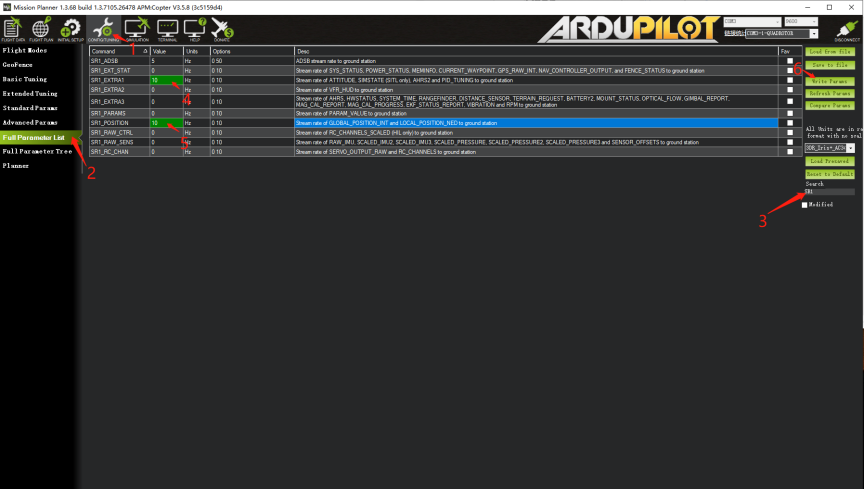
इसके अतिरिक्त, इस पोर्ट के लिए निम्नलिखित संदेश दरें निर्धारित करें:
•एसआरx_एक्सट्रा1 = 10
•एसआरएक्स_पोजीशन = 10
नोट: चैनल पर अनावश्यक डेटा के अतिभार को रोकने के लिए अन्य सभी SRx_xx पैरामीटर को 0 पर सेट किया जाना चाहिए।