









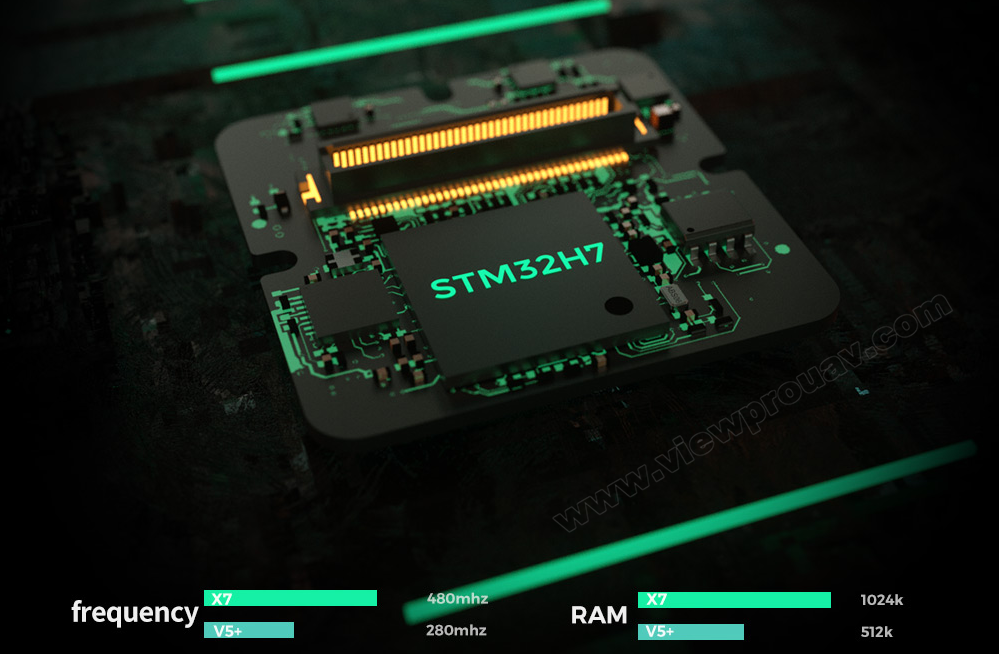
Più veloce che mai
Il pilota automatico della serie X7 utilizza processori della serie STM32H7, frequenza operativa della CPU aumentata a 480 MHz, memoria 1024 K, FLASH 2048 K, ha un processore più veloce e una memoria più grande e utilizza EEPROM da 512 K, può espandere i waypoint a 2048, porta più immaginazione alle applicazioni di volo
Adattarsi ad ambienti difficili
Il pilota automatico della serie x7 adotta un gran numero di chip a livello di auto e dispone di un sistema di compensazione della temperatura del sensore ad alta precisione integrato, che fa funzionare il sensore a una temperatura costante per garantire che possa funzionare con elevata precisione e alta sensibilità in ambienti ad alta e bassa temperatura.
Sempre stabile
Vengono utilizzati sensori della serie Invensense + Bosch + ADI+ TE, che hanno un rumore inferiore e prestazioni anti-urto e anti-vibrazione più elevate. Con la bussola di livello industriale RM3100, la stabilità di volo e le prestazioni anti-interferenza hanno portato un miglioramento qualitativo

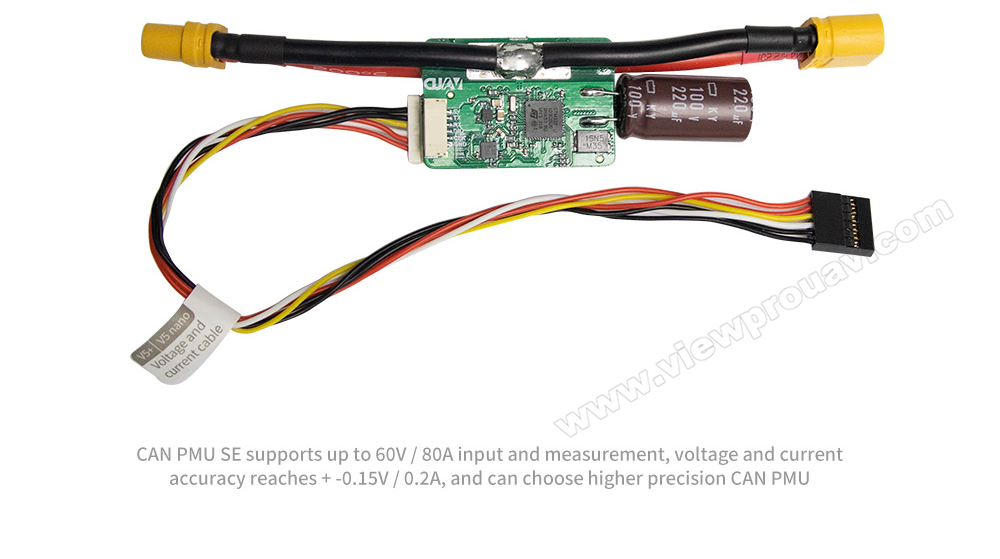
Elenco di imballaggio standard con modulo di potenza digitale
La dotazione predefinita include il modulo di rilevamento della potenza digitale PMU-SE con protocollo UAVCAN e l'algoritmo ITT auto-sviluppato CUAV integrato, che aiuta a misurare con precisione la tensione e la corrente in tempo reale del UAV e a rendere più affidabile la stima del tempo di volo.
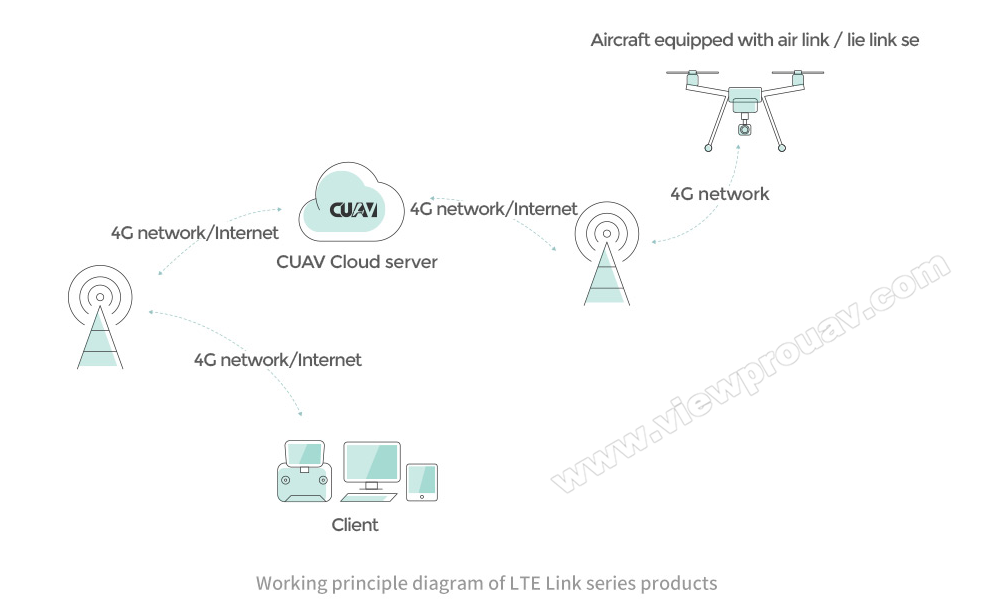
Opzionale: hardware di accesso al cloud CUAV LTE Link
Tutte le serie CUAV di autopiloti supportano la serie LTE Link di collegamenti di comunicazione della piattaforma cloud Lei Xun. Comunicano tramite reti 4G e 5G, controllano senza distanza, supportano la trasmissione video ad alta definizione in tempo reale e la condivisione video e supportano l'assegnazione di autorizzazioni e le funzioni di gestione del team di droni.
Protocollo UAVCAN
Protocollo standard UAVCAN, alto
in tempo reale, forte anti-interferenza
Barometro ad alta precisione incorporato
Barometro ad alta precisione integrato per soddisfare le esigenze di diversi scenari applicativi

NEO V2 Pro adotta il design a doppio filtraggio SAW + LNA + SAW, che evita efficacemente l'influenza del controllo remoto, della trasmissione digitale e dei segnali 4G sulla ricezione del posizionamento GPS.

Programma open source, supporta programmi personalizzati