


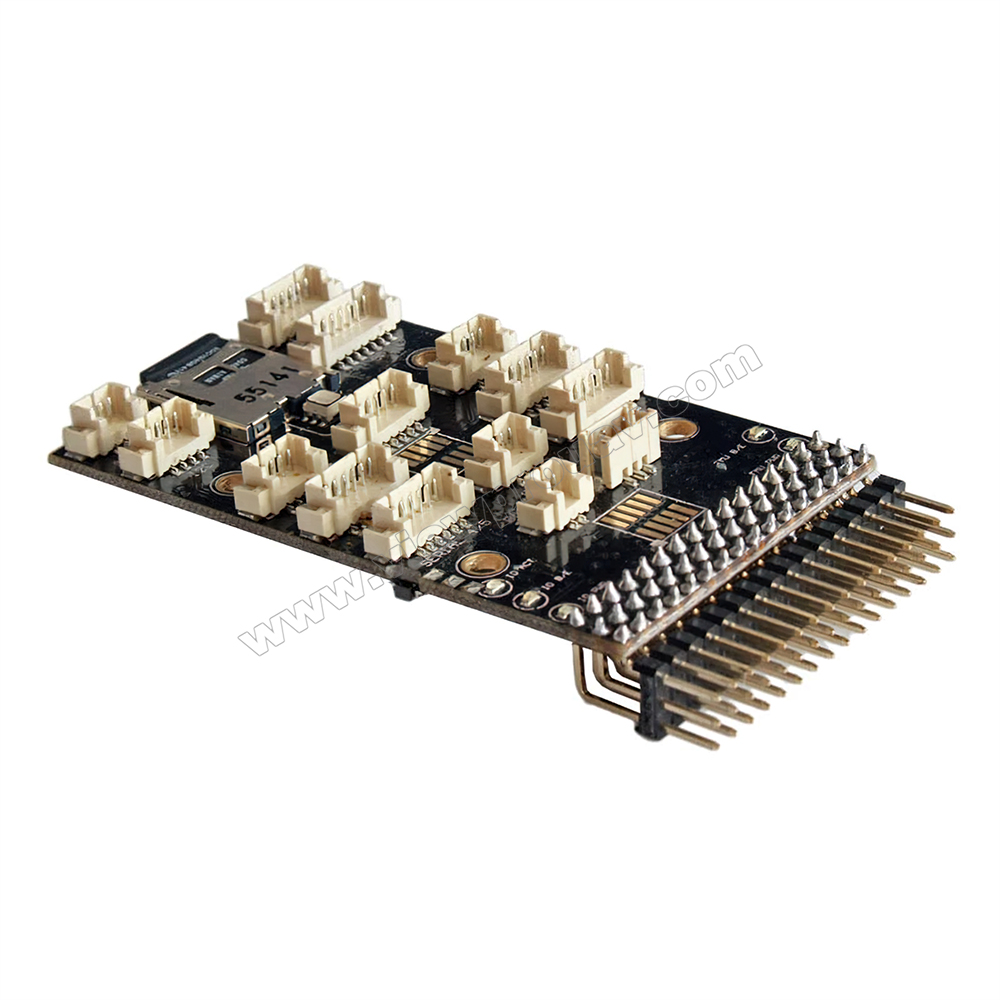



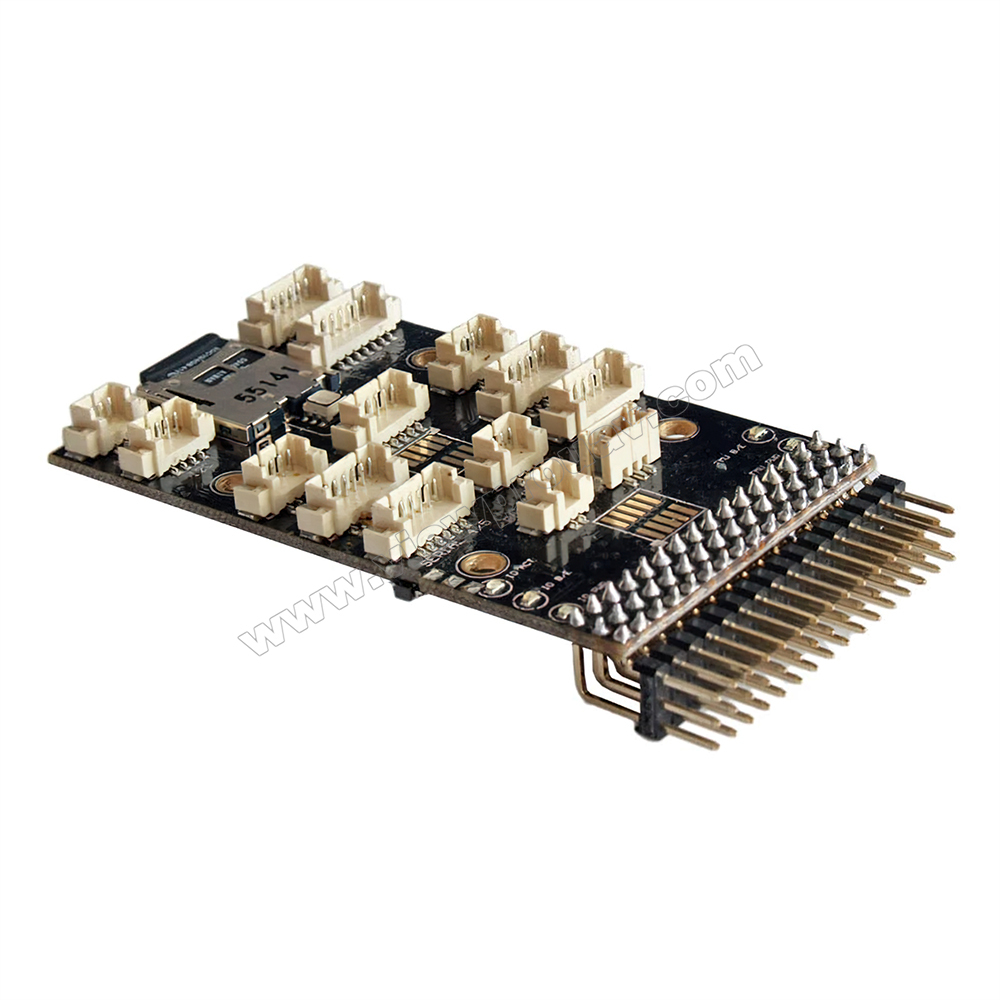



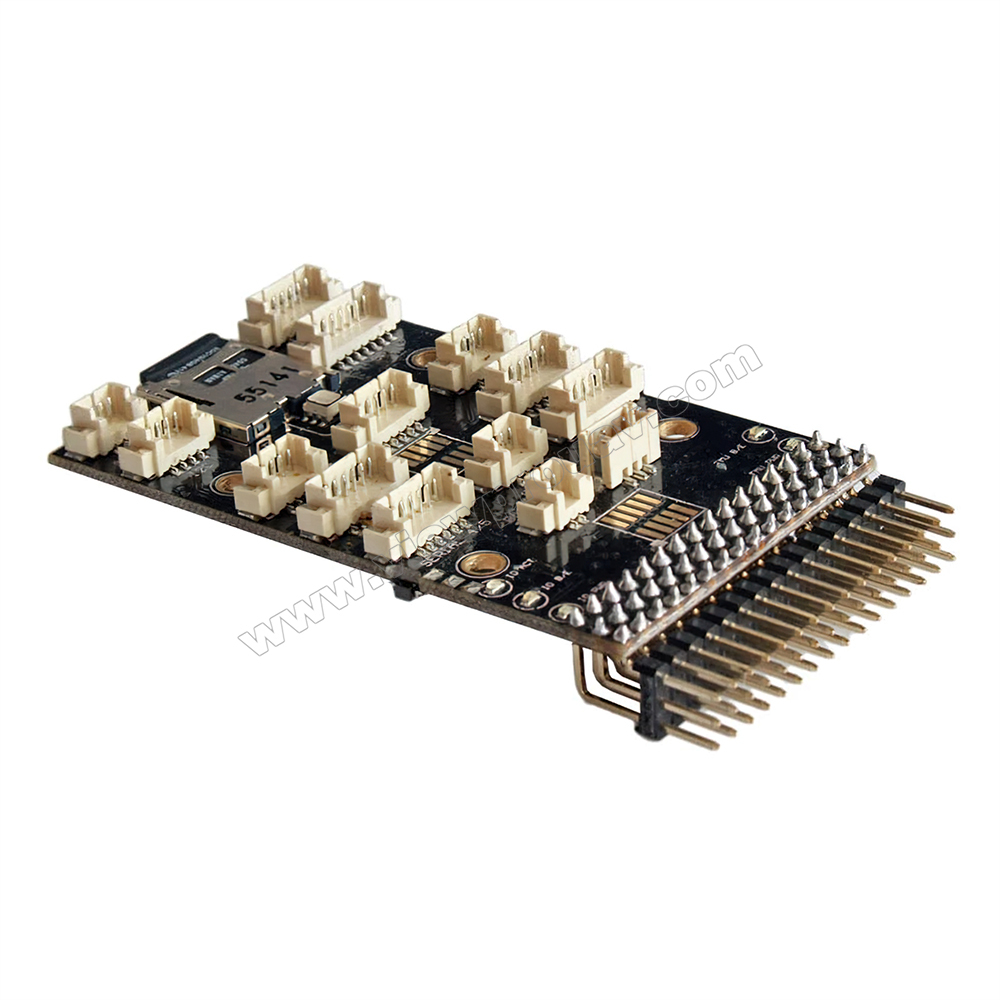

PX4 2.4.8 è stato appena rilasciato dal famoso produttore di hardware di controllo di volo open source, che è una nuova generazione di sistema di controllo di volo. Adotta un processore ARM a 32 bit ad alte prestazioni e tutto l'hardware è open source e i chip e i sensori utilizzati sono divulgati. Tutti i bus e le periferiche vengono esportati, non solo compatibili con altre periferiche, ma anche più convenienti per gli utenti con forti capacità di sviluppo. Il controllo di volo ha processori doppi integrati, uno dei quali è un potente processore stm32f427cortex a 32 bit, M4 core 168 MHz/256 KB RAM/2 MB Flash; l'altro è un coprocessore per uso industriale: STM32F103 a 32 bit, che funziona in modo stabile e garantisce un funzionamento sicuro.








Introduzione al prodotto
Specificazione
Specifiche del controller di volo open source Autopilot PX4 2.4.8
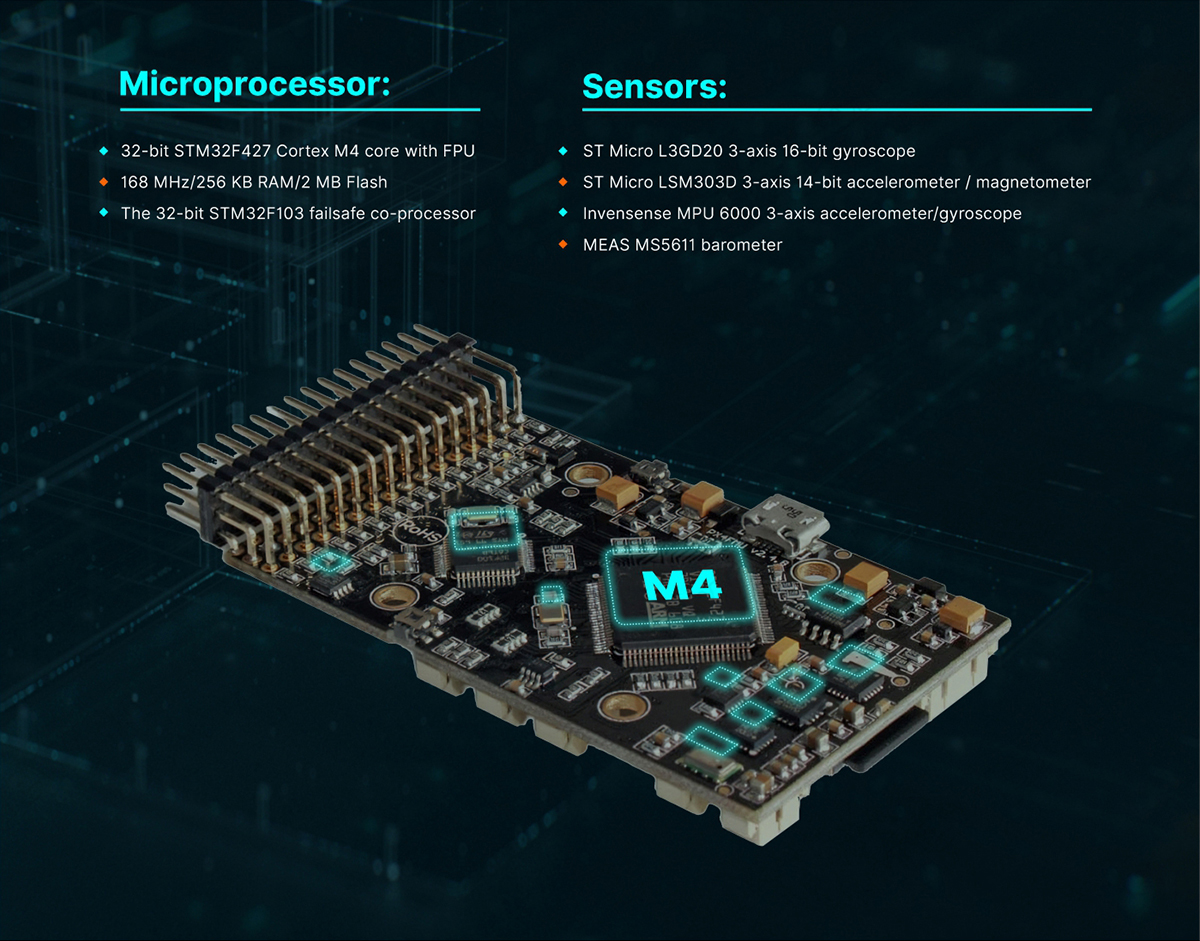
Microprocessore:
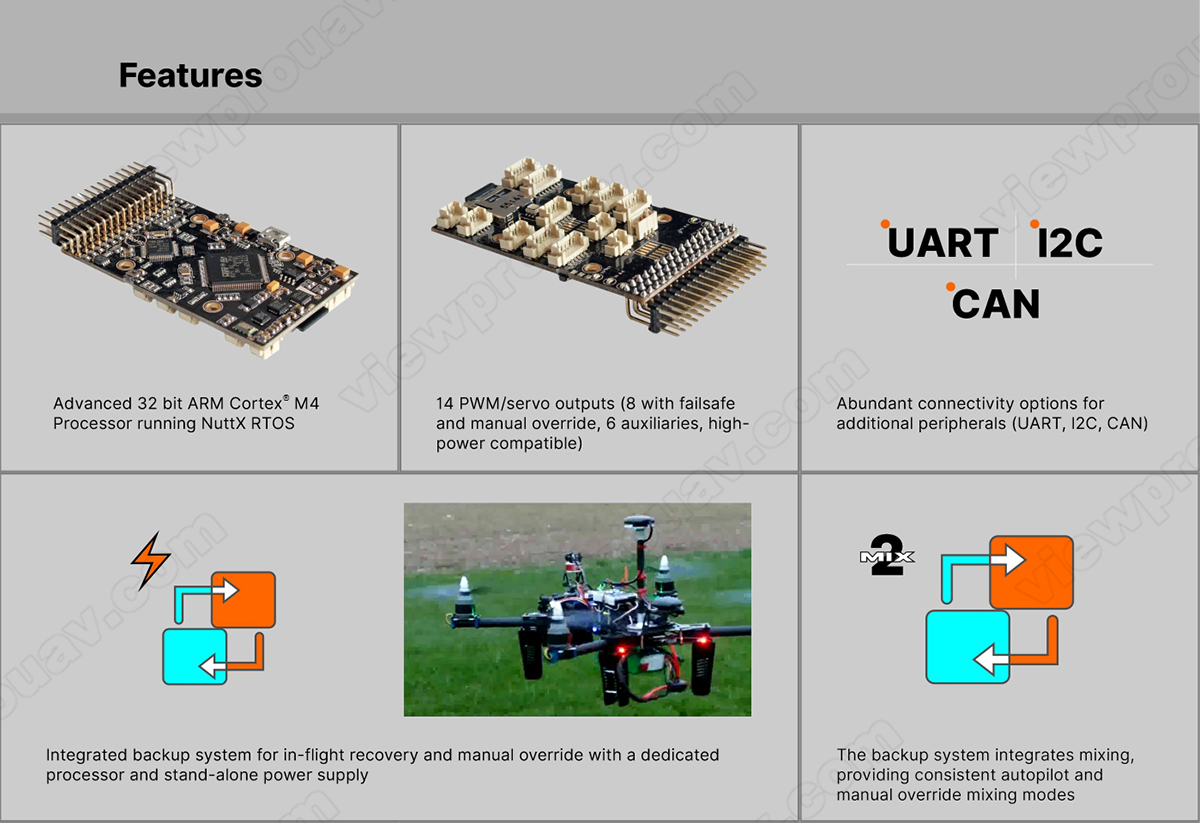
- Core Cortex M4 STM32F427 a 32 bit con FPU
- 168 MHz / 256 KB RAM / 2 MB Flash
- Coprocessore fail-safe STM32F103 a 32 bit
Sensori:
- Giroscopio a 3 assi e 16 bit L3GD20
- Accelerometro/magnetometro a 3 assi e 14 bit LSM303D
- Accelerometro/giroscopio a 3 assi MPU 6000
- 5611 barometro
Interfacce:
- 5x UART (porte seriali), una ad alta potenza, 2x con controllo del flusso HW
- 2x LATTINA
- Ingresso e uscita S.BUS
- Segnale di somma PPM
- Ingresso RSSI (PWM o tensione)
- I2C
- SPI
- Ingressi ADC da 3,3 e 6,6 V
- Porta micro-USB esterna
Sistema di alimentazione:
- Regolatore diodo ideale con failover automatico
- Servo rail ad alta potenza (7 V) e ad alta corrente pronto
- Tutte le uscite periferiche protette da sovracorrente, tutti gli ingressi protetti da ESD
Peso e dimensioni:
Peso: 38 g (1,31 once)
Larghezza: 50 mm (1,96")
Spessore: 15,5 mm (0,61")
Lunghezza: 81,5 mm (3,21")
Specifiche GPS
Precisione della velocità: 0,1 m/s
Altezza massima: 50.000 m
Velocità massima: 515 m/s
Accelerazione massima: 4 G
Frequenza di aggiornamento: 10 Hz
Tempo per la prima riparazione: avvio a freddo: 26 s, avvio a caldo: 1 s
Alimentazione: tensione DC 5V±5%
Diametro: 54 mm / 2,126 pollici
Spessore: 15 mm / 0,59 pollici
Per maggiori dettagli, visita PX4 2.4.8 Autopilot Open Source Flight Controller per sviluppatori di droni
-
Introduzione al prodotto
-
Specificazione
PX4 2.4.8 è stato appena rilasciato dal famoso produttore di hardware di controllo di volo open source, che è una nuova generazione di sistema di controllo di volo. Adotta un processore ARM a 32 bit ad alte prestazioni e tutto l'hardware è open source e i chip e i sensori utilizzati sono divulgati. Tutti i bus e le periferiche vengono esportati, non solo compatibili con altre periferiche, ma anche più convenienti per gli utenti con forti capacità di sviluppo. Il controllo di volo ha processori doppi integrati, uno dei quali è un potente processore stm32f427cortex a 32 bit, M4 core 168 MHz/256 KB RAM/2 MB Flash; l'altro è un coprocessore per uso industriale: STM32F103 a 32 bit, che funziona in modo stabile e garantisce un funzionamento sicuro.
Specifiche del controller di volo open source Autopilot PX4 2.4.8
Microprocessore:
- Core Cortex M4 STM32F427 a 32 bit con FPU
- 168 MHz / 256 KB RAM / 2 MB Flash
- Coprocessore fail-safe STM32F103 a 32 bit
Sensori:
- Giroscopio a 3 assi e 16 bit L3GD20
- Accelerometro/magnetometro a 3 assi e 14 bit LSM303D
- Accelerometro/giroscopio a 3 assi MPU 6000
- 5611 barometro
Interfacce:
- 5x UART (porte seriali), una ad alta potenza, 2x con controllo del flusso HW
- 2x LATTINA
- Ingresso e uscita S.BUS
- Segnale di somma PPM
- Ingresso RSSI (PWM o tensione)
- I2C
- SPI
- Ingressi ADC da 3,3 e 6,6 V
- Porta micro-USB esterna
Sistema di alimentazione:
- Regolatore diodo ideale con failover automatico
- Servo rail ad alta potenza (7 V) e ad alta corrente pronto
- Tutte le uscite periferiche protette da sovracorrente, tutti gli ingressi protetti da ESD
Peso e dimensioni:
Peso: 38 g (1,31 once)
Larghezza: 50 mm (1,96")
Spessore: 15,5 mm (0,61")
Lunghezza: 81,5 mm (3,21")
Specifiche GPS
Precisione della velocità: 0,1 m/s
Altezza massima: 50.000 m
Velocità massima: 515 m/s
Accelerazione massima: 4 G
Frequenza di aggiornamento: 10 Hz
Tempo per la prima riparazione: avvio a freddo: 26 s, avvio a caldo: 1 s
Alimentazione: tensione DC 5V±5%
Diametro: 54 mm / 2,126 pollici
Spessore: 15 mm / 0,59 pollici
Per maggiori dettagli, visita PX4 2.4.8 Autopilot Open Source Flight Controller per sviluppatori di droni