









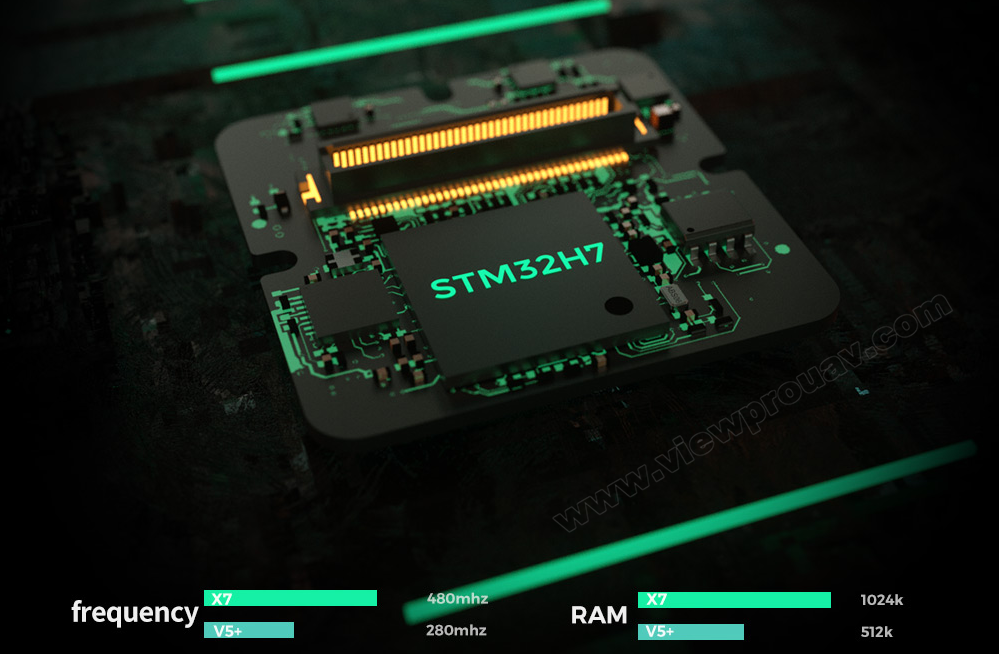
그 어느 때보다 더 빠르게
X7 시리즈 자동 조종 장치는 STM32H7 시리즈 프로세서를 사용하고 CPU 작동 주파수는 480Mhz로 증가했으며 저장 공간은 1024K, FLASH 2048K로 더 빠른 프로세서와 더 큰 저장 공간을 갖추고 있으며 512K EEPROM을 사용하여 경로점을 2048개까지 확장할 수 있어 비행 애플리케이션에 더 많은 상상력을 불어넣습니다.
혹독한 환경에 적응하다
x7 시리즈 오토파일럿은 다수의 자동차 수준 칩을 채택하고 고정밀 센서 온도 보정 시스템이 내장되어 있어 센서가 일정한 온도에서 작동하여 센서가 고온 및 저온 환경에서 높은 정확도와 고감도로 작동할 수 있습니다.
항상 안정적이다
Invensense + Bosch + ADI+ TE 시리즈 센서를 사용하여 소음이 낮고 충격 방지 및 진동 방지 성능이 더 강합니다. 산업용 나침반 RM3100을 사용하면 비행 안정성과 간섭 방지 성능이 질적으로 향상되었습니다.

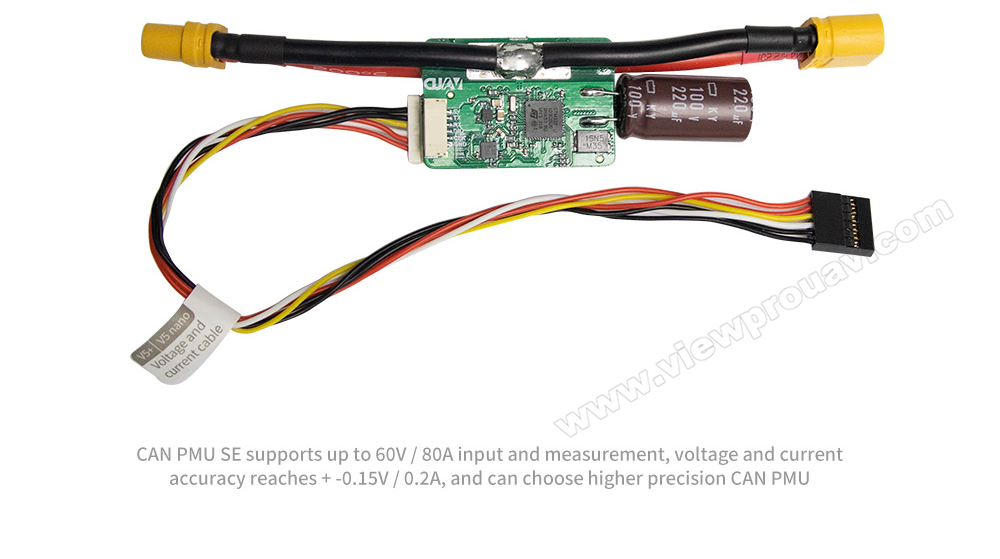
디지털 전원 모듈이 포함된 표준 포장 목록
기본 패킹 목록에는 UAVCAN 프로토콜 디지털 PMU-SE 디지털 전력 감지 모듈, CUAV 자체 개발 ITT 알고리즘이 내장되어 있어 UAV의 실시간 전압 및 전류를 정확하게 측정하고 비행 시간 추정을 보다 신뢰할 수 있게 해줍니다.
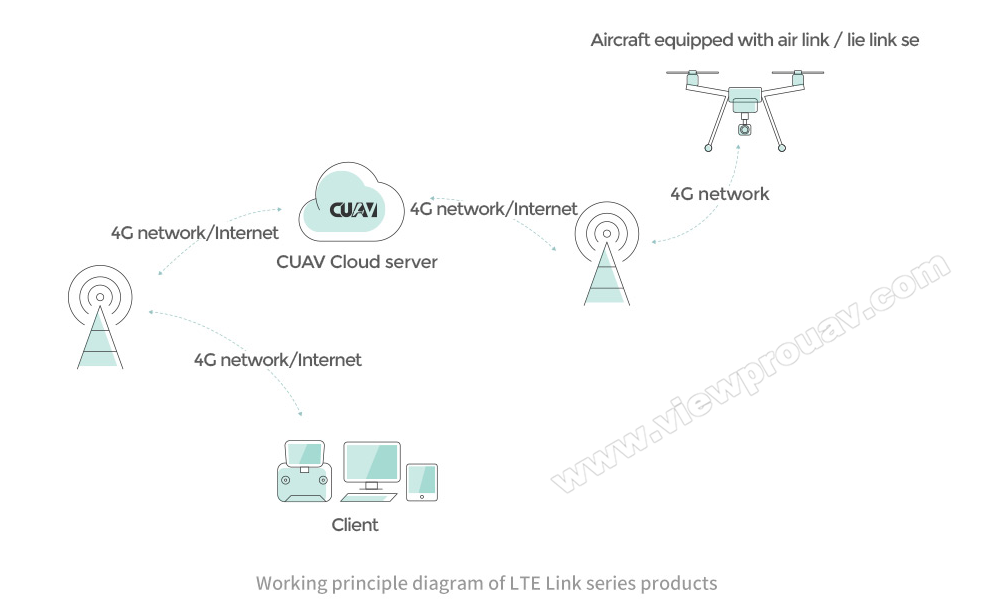
옵션: CUAV 클라우드 액세스 하드웨어 LTE 링크
모든 CUAV 시리즈 오토파일럿은 Lei Xun 클라우드 플랫폼의 LTE Link 시리즈 통신 링크를 지원합니다. 4G 및 5G 네트워크를 통해 통신하고, 거리 없이 제어하며, 실시간 고화질 비디오 전송 및 비디오 공유를 지원하고, 권한 할당 및 드론 팀 관리 기능을 지원합니다.
UAVCAN 프로토콜
UAVCAN 표준 프로토콜, 높음
실시간, 강력한 간섭 방지
고정밀 기압계 내장
다양한 응용 시나리오의 요구 사항을 충족하는 내장형 고정밀 기압계

NEO V2 Pro는 SAW + LNA + SAW 이중 필터링 설계를 채택하여 원격 제어, 디지털 전송 및 4G 신호가 GPS 위치 수신에 미치는 영향을 효과적으로 방지합니다.

프로그램 오픈소스, 맞춤형 프로그램 지원