


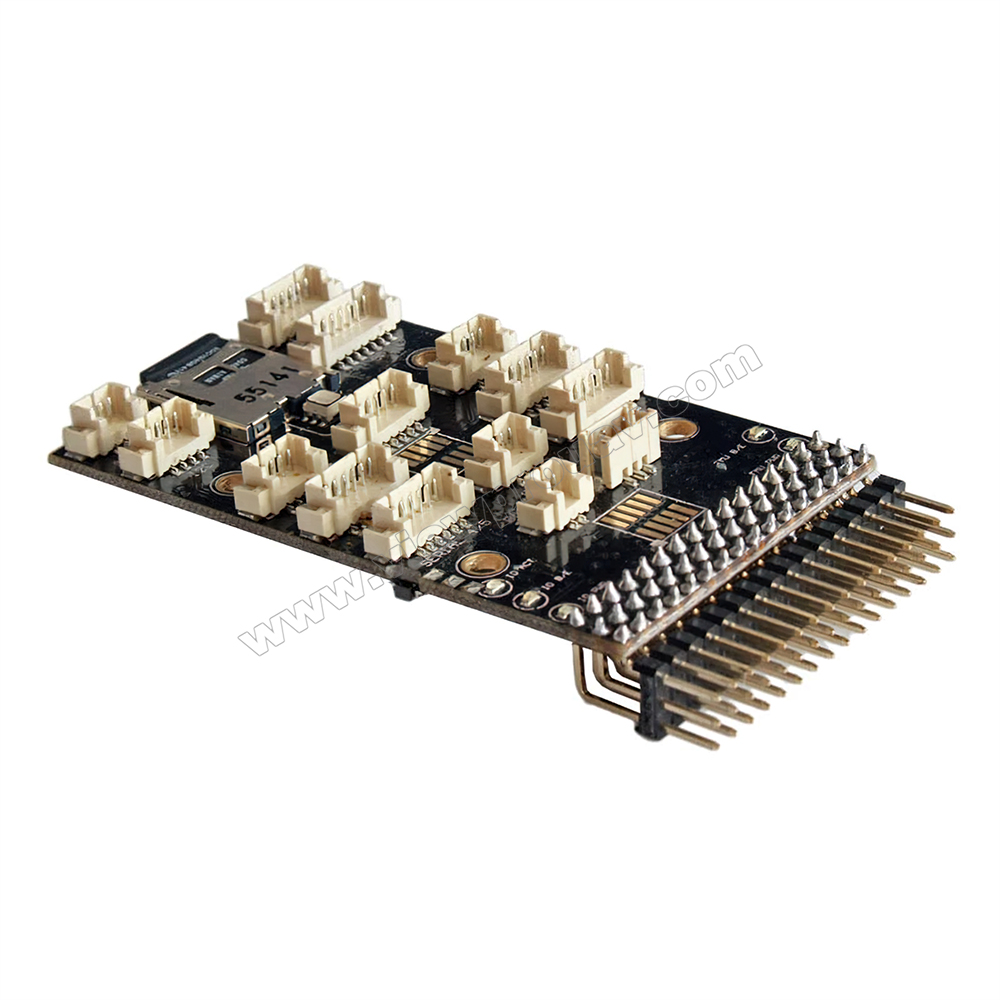



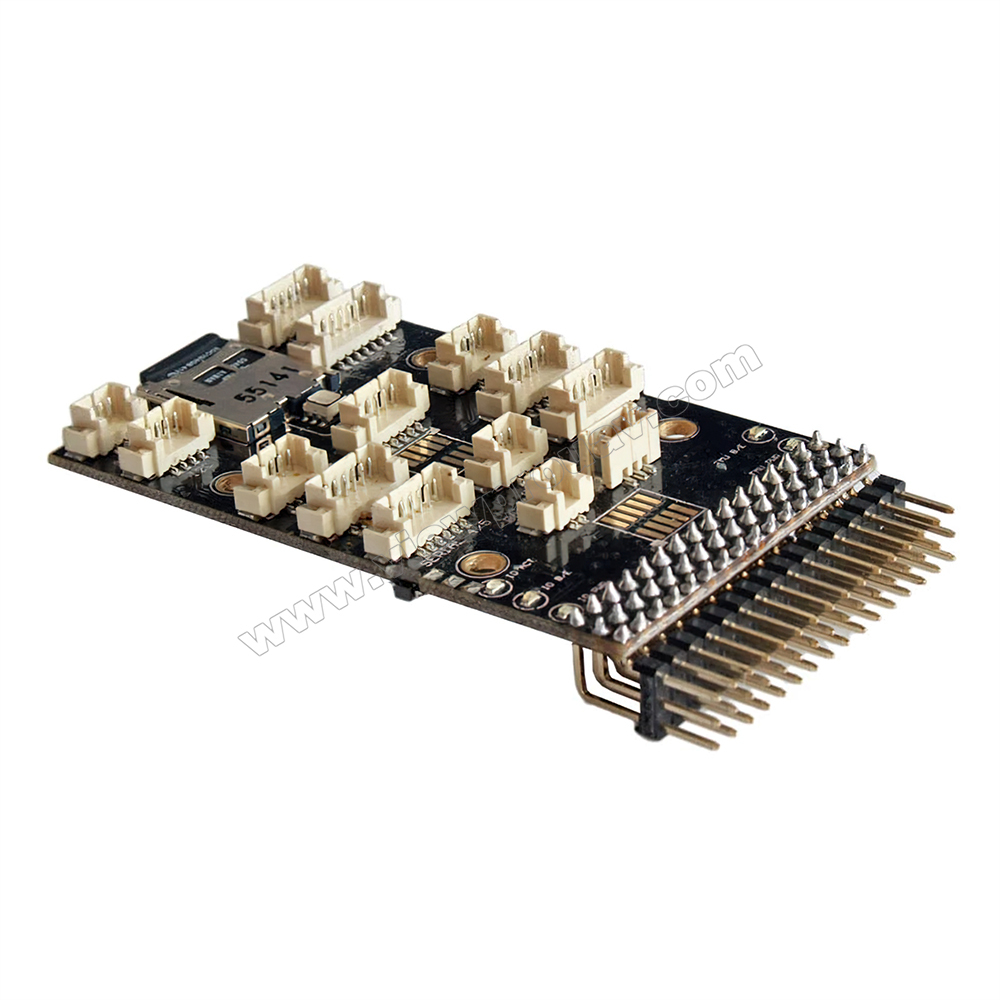



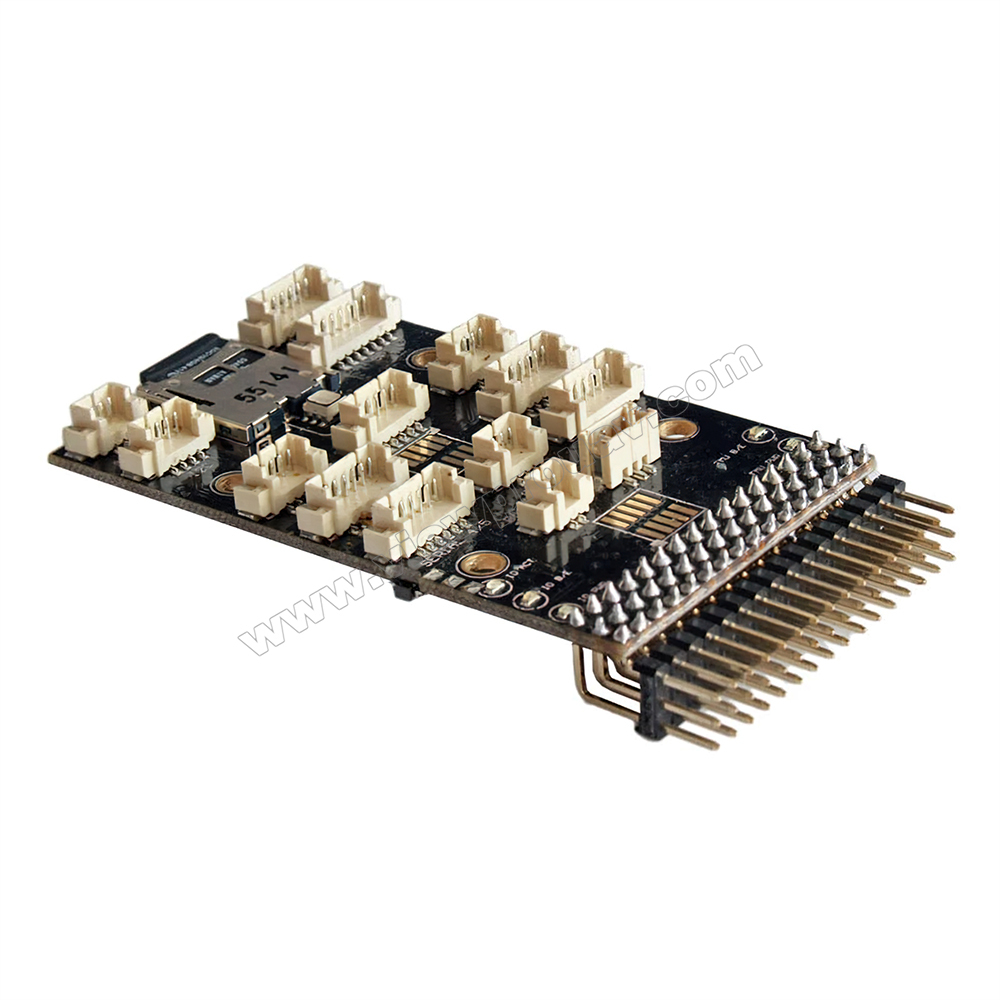

PX4 2.4.8은 유명한 오픈소스 비행 제어 하드웨어 제조업체에서 새롭게 출시한 차세대 비행 제어 시스템입니다. 고성능 32비트 ARM 프로세서를 채택했으며 모든 하드웨어는 오픈소스이고 사용된 칩과 센서는 공개됩니다. 모든 버스와 주변 장치는 내보내지며 다른 주변 장치와 호환될 뿐만 아니라 강력한 개발 역량을 갖춘 사용자에게 더욱 편리합니다. 비행 제어에는 듀얼 프로세서가 내장되어 있으며, 그 중 하나는 강력한 32비트 stm32f427cortex, M4 코어 168MHz/256KB RAM/2MB 플래시 프로세서이고, 다른 하나는 산업용 보조 프로세서인 32비트 STM32F103으로 안정적으로 실행되고 안전한 작동을 보장합니다.








제품 소개
사양
PX4 2.4.8 Autopilot 오픈 소스 비행 컨트롤러 사양
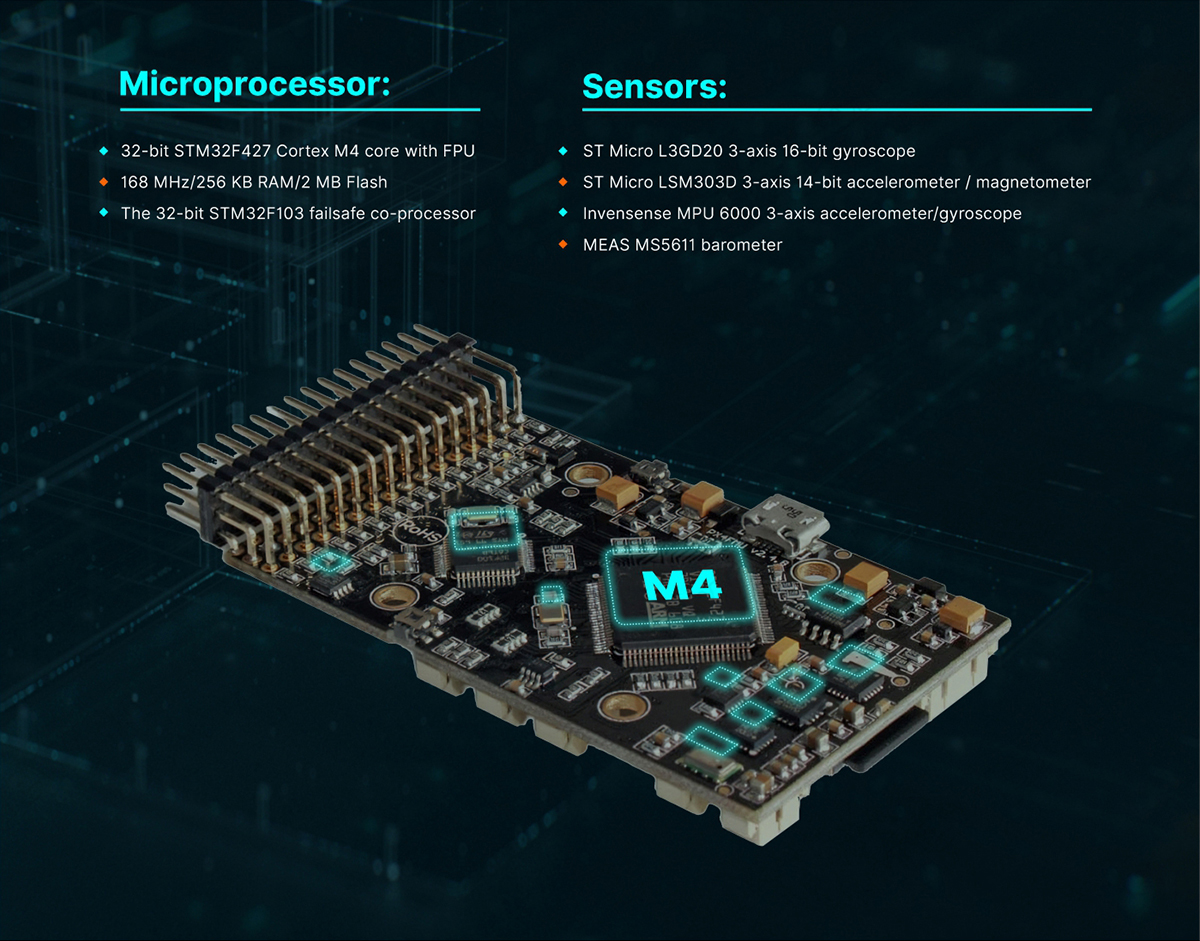
마이크로프로세서:
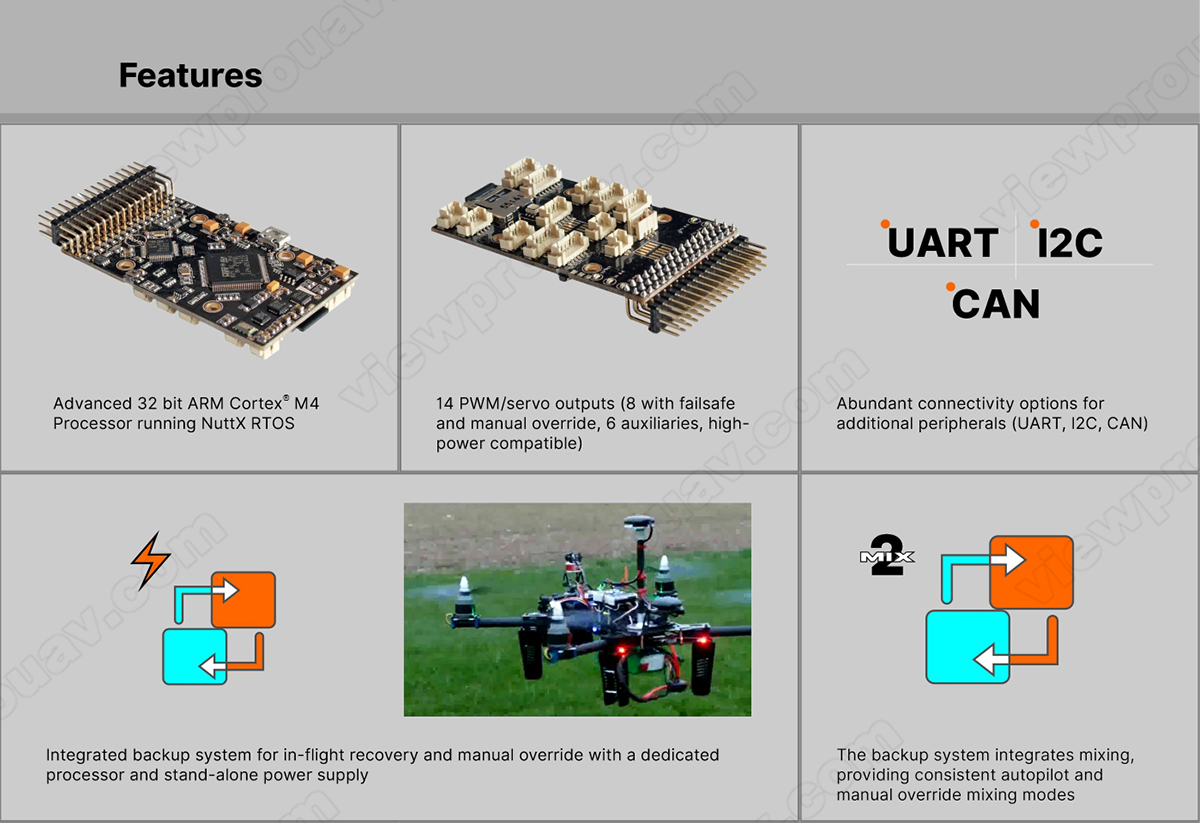
- FPU가 포함된 32비트 STM32F427 Cortex M4 코어
- 168MHz / 256KB RAM / 2MB 플래시
- 32비트 STM32F103 안전 보조 프로세서
센서:
- L3GD20 3축 16비트 자이로스코프
- LSM303D 3축 14비트 가속도계/자력계
- MPU 6000 3축 가속도계/자이로스코프
- 5611 기압계
인터페이스:
- 5x UART(직렬 포트), 1개는 고전력 가능, 2개는 HW 흐름 제어 가능
- 2x 캔
- S.BUS 입력 및 출력
- PPM 합 신호
- RSSI(PWM 또는 전압) 입력
- I2C
- 에스피에이
- 3.3 및 6.6V ADC 입력
- 외부 마이크로 USB 포트
전원 시스템:
- 자동 장애 조치 기능이 있는 Ideal 다이오드 컨트롤러
- 서보 레일 고전력(7V) 및 고전류 지원
- 모든 주변 출력 과전류 보호, 모든 입력 ESD 보호
무게 및 치수:
무게: 38g(1.31oz)
폭: 50mm(1.96")
두께: 15.5mm(0.61")
길이: 81.5mm(3.21")
GPS 사양
속도 정밀도: 0.1m/s
최대 높이: 50,000m
최대 속도: 515m/s
최대 가속도: 4G
업데이트 속도: 10Hz
첫 번째 수정 시간: 콜드 스타트: 26초, 핫 스타트: 1초
전원 공급 : 전압 DC 5V±5%
직경: 54mm / 2.126인치
두께: 15mm / 0.59인치
-
제품 소개
-
사양
PX4 2.4.8은 유명한 오픈소스 비행 제어 하드웨어 제조업체에서 새롭게 출시한 차세대 비행 제어 시스템입니다. 고성능 32비트 ARM 프로세서를 채택했으며 모든 하드웨어는 오픈소스이고 사용된 칩과 센서는 공개됩니다. 모든 버스와 주변 장치는 내보내지며 다른 주변 장치와 호환될 뿐만 아니라 강력한 개발 역량을 갖춘 사용자에게 더욱 편리합니다. 비행 제어에는 듀얼 프로세서가 내장되어 있으며, 그 중 하나는 강력한 32비트 stm32f427cortex, M4 코어 168MHz/256KB RAM/2MB 플래시 프로세서이고, 다른 하나는 산업용 보조 프로세서인 32비트 STM32F103으로 안정적으로 실행되고 안전한 작동을 보장합니다.
PX4 2.4.8 Autopilot 오픈 소스 비행 컨트롤러 사양
마이크로프로세서:
- FPU가 포함된 32비트 STM32F427 Cortex M4 코어
- 168MHz / 256KB RAM / 2MB 플래시
- 32비트 STM32F103 안전 보조 프로세서
센서:
- L3GD20 3축 16비트 자이로스코프
- LSM303D 3축 14비트 가속도계/자력계
- MPU 6000 3축 가속도계/자이로스코프
- 5611 기압계
인터페이스:
- 5x UART(직렬 포트), 1개는 고전력 가능, 2개는 HW 흐름 제어 가능
- 2x 캔
- S.BUS 입력 및 출력
- PPM 합 신호
- RSSI(PWM 또는 전압) 입력
- I2C
- 에스피에이
- 3.3 및 6.6V ADC 입력
- 외부 마이크로 USB 포트
전원 시스템:
- 자동 장애 조치 기능이 있는 Ideal 다이오드 컨트롤러
- 서보 레일 고전력(7V) 및 고전류 지원
- 모든 주변 출력 과전류 보호, 모든 입력 ESD 보호
무게 및 치수:
무게: 38g(1.31oz)
폭: 50mm(1.96")
두께: 15.5mm(0.61")
길이: 81.5mm(3.21")
GPS 사양
속도 정밀도: 0.1m/s
최대 높이: 50,000m
최대 속도: 515m/s
최대 가속도: 4G
업데이트 속도: 10Hz
첫 번째 수정 시간: 콜드 스타트: 26초, 핫 스타트: 1초
전원 공급 : 전압 DC 5V±5%
직경: 54mm / 2.126인치
두께: 15mm / 0.59인치