7. Q: How to set up the open source flight control to solve the roll axis tilting problem of gimbal when fixed wing turns too fast?
Answer:
Connect the gimbal serial port to a TELEM of a open source flight control (e.g.: Pixhawk) to compensate for horizon drift during high dynamic flight.
FC TELEM port parameter settings: baud rate 115200, MAvlink1.
Set the parameters in ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Where “x” is the port number. The value is 1 (Mavlink).
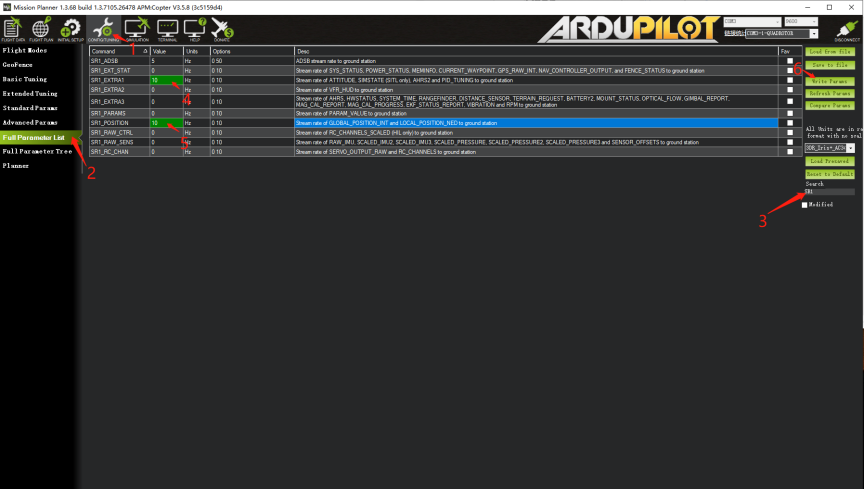
In addition, set the following message rates for this port:
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
Note: All other SRx_xx parameters should be set to 0 to prevent unnecessary data from overloading the channel.