7. P: Como configurar o controle de voo de código aberto para resolver o problema de inclinação do eixo de rotação do gimbal quando a asa fixa gira muito rápido?
Responder:
Conecte a porta serial do gimbal a um TELEM de um controle de voo de código aberto (por exemplo: Pixhawk) para compensar o desvio do horizonte durante o voo altamente dinâmico.
Configurações de parâmetros da porta FC TELEM: taxa de transmissão 115200, MAvlink1.
Defina os parâmetros no ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Onde “x” é o número da porta. O valor é 1 (Mavlink).
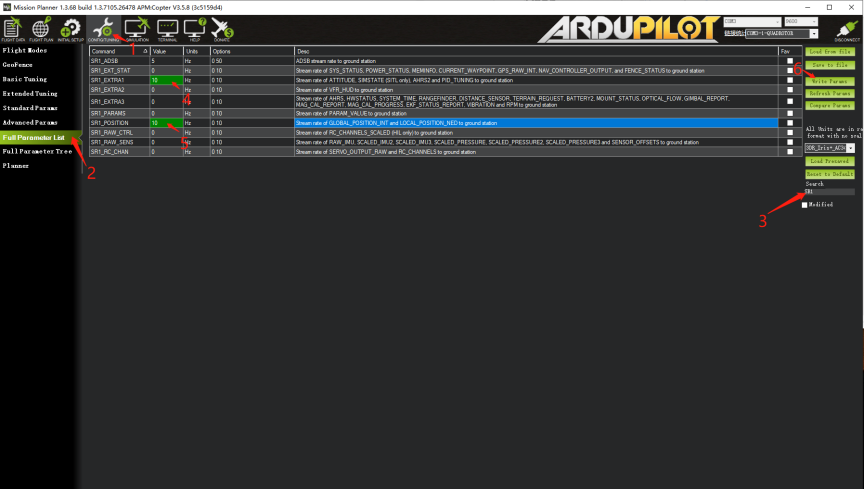
Além disso, defina as seguintes taxas de mensagens para esta porta:
•SRx_EXTRA1 = 10
•SRx_POSIÇÃO = 10
Observação: todos os outros parâmetros SRx_xx devem ser definidos como 0 para evitar que dados desnecessários sobrecarreguem o canal.