7. В: Как настроить систему управления полетом с открытым исходным кодом, чтобы решить проблему наклона оси крена подвеса, когда неподвижное крыло поворачивается слишком быстро?
Отвечать:
Подключите последовательный порт подвеса к TELEM системы управления полетом с открытым исходным кодом (например, Pixhawk), чтобы компенсировать дрейф горизонта во время высокодинамичного полета.
Настройки параметров порта FC TELEM: скорость передачи данных 115200, MAvlink1.
Установите параметры в ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Где «x» — номер порта. Значение — 1 (Mavlink).
Кроме того, установите следующие скорости сообщений для этого порта:
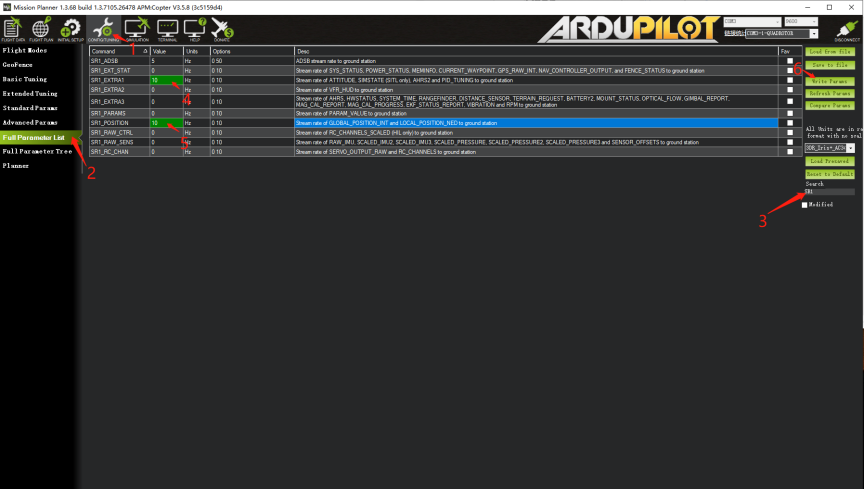
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
Примечание: все остальные параметры SRx_xx следует установить на 0, чтобы ненужные данные не перегружали канал.