









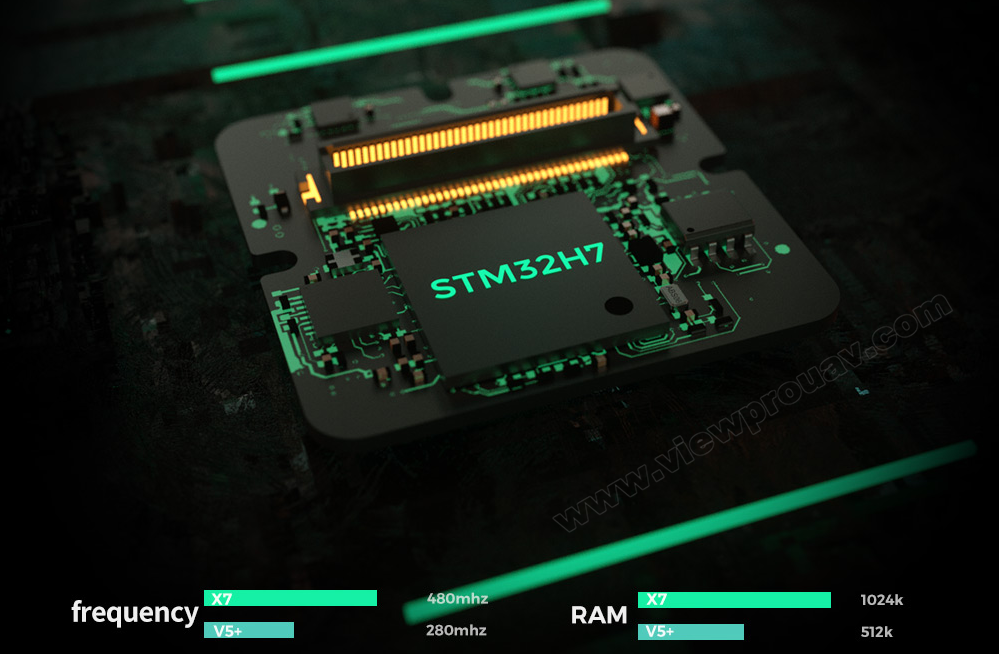
ระบบออโตไพลอตซีรีส์ X7 ใช้โปรเซสเซอร์ซีรีส์ STM32H7 ความถี่การทำงานของ CPU เพิ่มขึ้นเป็น 480Mhz พื้นที่เก็บข้อมูล 1024K, FLASH 2048K มีโปรเซสเซอร์ที่เร็วขึ้นและพื้นที่เก็บข้อมูลขนาดใหญ่ขึ้น และใช้ EEPROM 512K สามารถขยายจุดอ้างอิงได้ถึง 2048 จุด นำจินตนาการมาสู่การใช้งานการบินมากขึ้น
ปรับตัวเข้ากับสภาพแวดล้อมที่รุนแรง
ระบบขับเคลื่อนอัตโนมัติซีรีส์ x7 ใช้ชิประดับรถจำนวนมากและมีระบบชดเชยอุณหภูมิเซ็นเซอร์ความแม่นยำสูงในตัว ซึ่งทำให้เซ็นเซอร์ทำงานที่อุณหภูมิคงที่เพื่อให้แน่ใจว่าเซ็นเซอร์สามารถทำงานได้อย่างแม่นยำและมีความไวสูงในสภาพแวดล้อมที่มีอุณหภูมิสูงและต่ำ
มั่นคงเสมอ
เซ็นเซอร์ซีรีส์ Invensense + Bosch + ADI+ TE ถูกนำมาใช้ ซึ่งมีเสียงรบกวนน้อยกว่าและมีประสิทธิภาพในการป้องกันแรงกระแทกและการสั่นสะเทือนที่แข็งแกร่งกว่า ด้วยเข็มทิศระดับอุตสาหกรรม RM3100 ความเสถียรในการบินและประสิทธิภาพในการป้องกันสัญญาณรบกวนทำให้คุณภาพได้รับการปรับปรุง

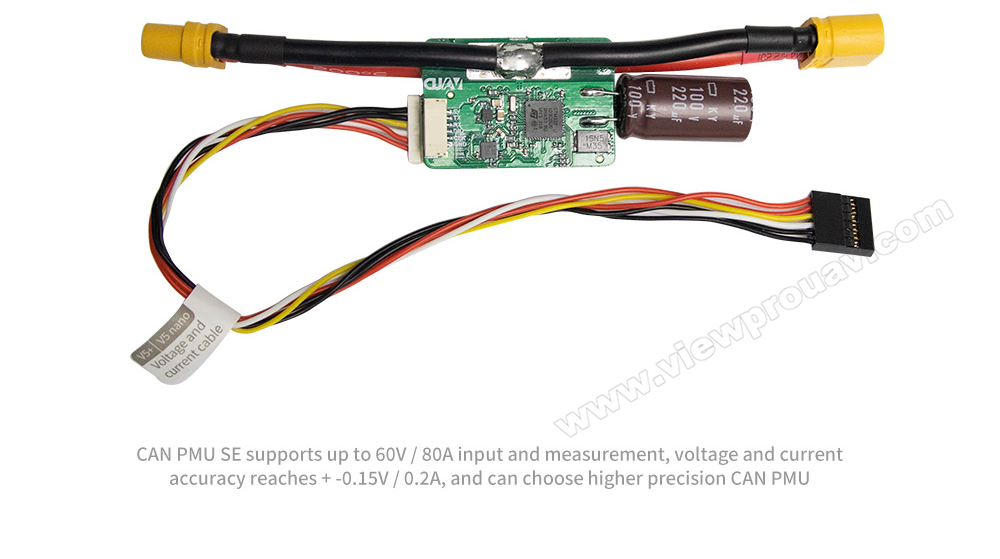
รายการบรรจุภัณฑ์มาตรฐานพร้อมโมดูลพลังงานดิจิตอล
รายการบรรจุภัณฑ์เริ่มต้นประกอบไปด้วยโมดูลตรวจจับพลังงานแบบดิจิทัล PMU-SE โปรโตคอล UAVCAN, อัลกอริธึม ITT ในตัวที่ CUAV พัฒนาขึ้นเอง ช่วยวัดแรงดันไฟและกระแสไฟฟ้าแบบเรียลไทม์ของ UAV ได้อย่างแม่นยำ และทำให้การประมาณเวลาบินเชื่อถือได้มากขึ้น
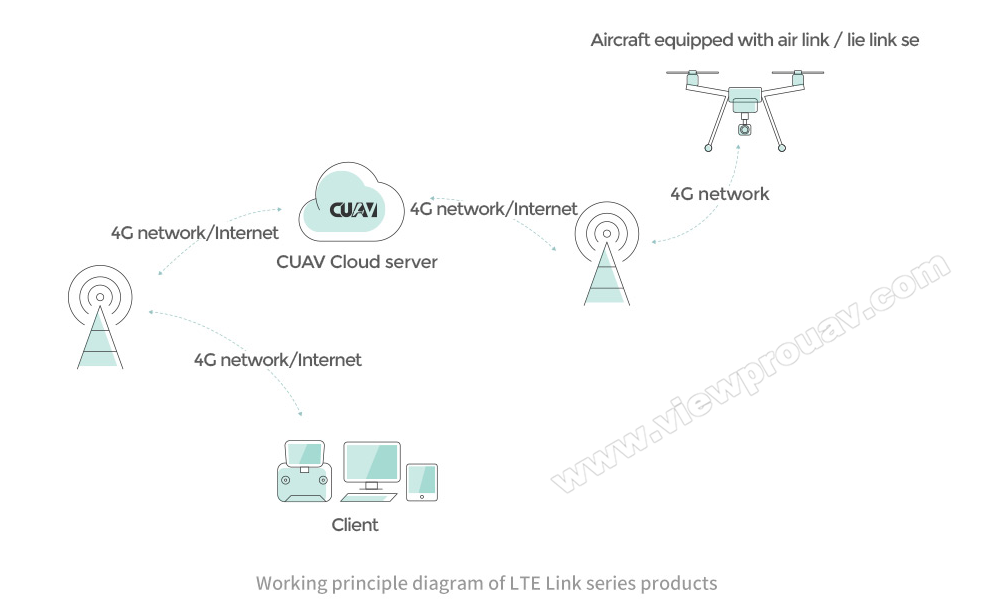
ตัวเลือก: ฮาร์ดแวร์การเข้าถึง CUAV Cloud LTE Link
ระบบออโตไพลอตซีรีส์ CUAV ทั้งหมดรองรับลิงก์การสื่อสารซีรีส์ LTE Link ของแพลตฟอร์มคลาวด์ Lei Xun โดยสื่อสารผ่านเครือข่าย 4G และ 5G ควบคุมโดยไม่ต้องมีระยะทาง รองรับการส่งวิดีโอความละเอียดสูงแบบเรียลไทม์และการแชร์วิดีโอ และรองรับการจัดสรรสิทธิ์และฟังก์ชันการจัดการทีมของโดรน
โปรโตคอล UAVCAN
มาตรฐานโปรโตคอล UAVCAN สูง
แบบเรียลไทม์, ป้องกันการรบกวนที่แข็งแกร่ง
บารอมิเตอร์ความแม่นยำสูงในตัว
เครื่องวัดความกดอากาศความแม่นยำสูงในตัวเพื่อตอบสนองความต้องการของสถานการณ์การใช้งานที่แตกต่างกัน

NEO V2 Pro ใช้การออกแบบการกรองแบบคู่ SAW + LNA + SAW ซึ่งสามารถหลีกเลี่ยงอิทธิพลของการควบคุมระยะไกล การส่งสัญญาณดิจิทัล และสัญญาณ 4G ในการรับสัญญาณระบุตำแหน่ง GpS ได้อย่างมีประสิทธิภาพ

โปรแกรมโอเพ่นซอร์ส รองรับโปรแกรมที่กำหนดเอง