


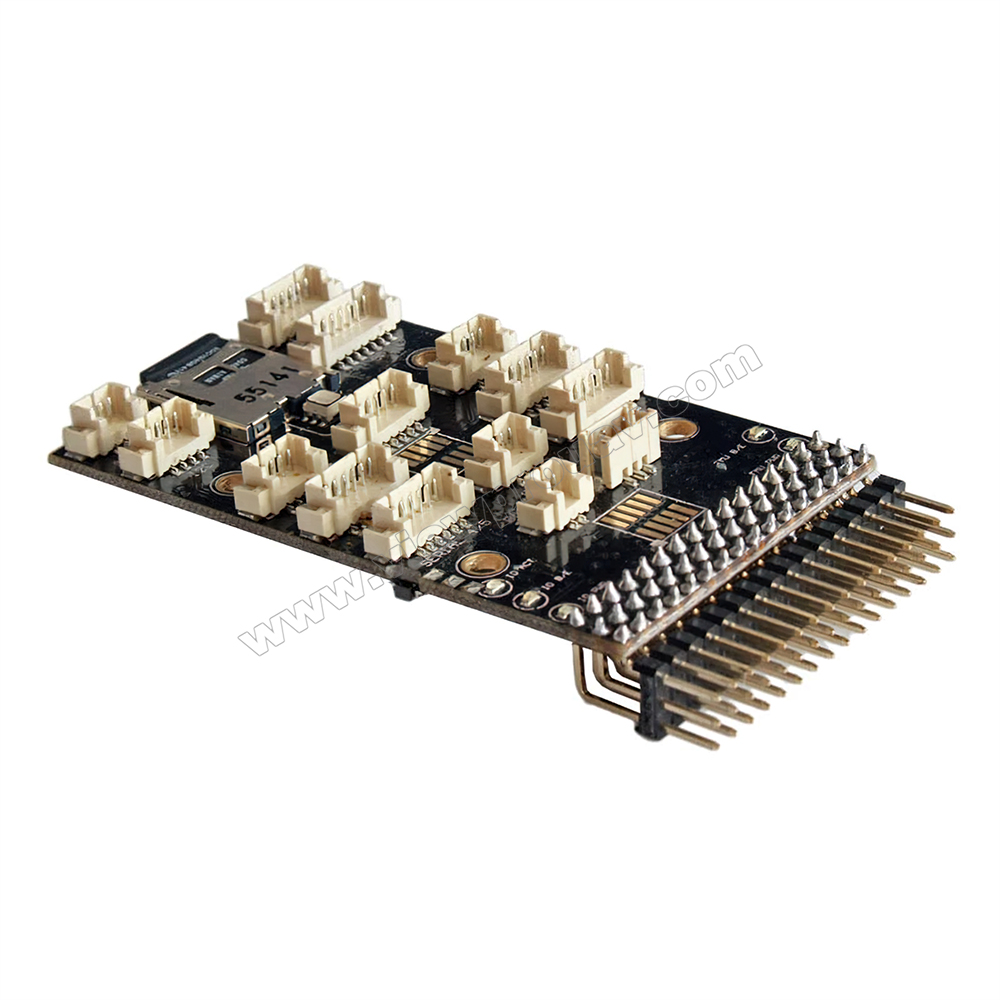



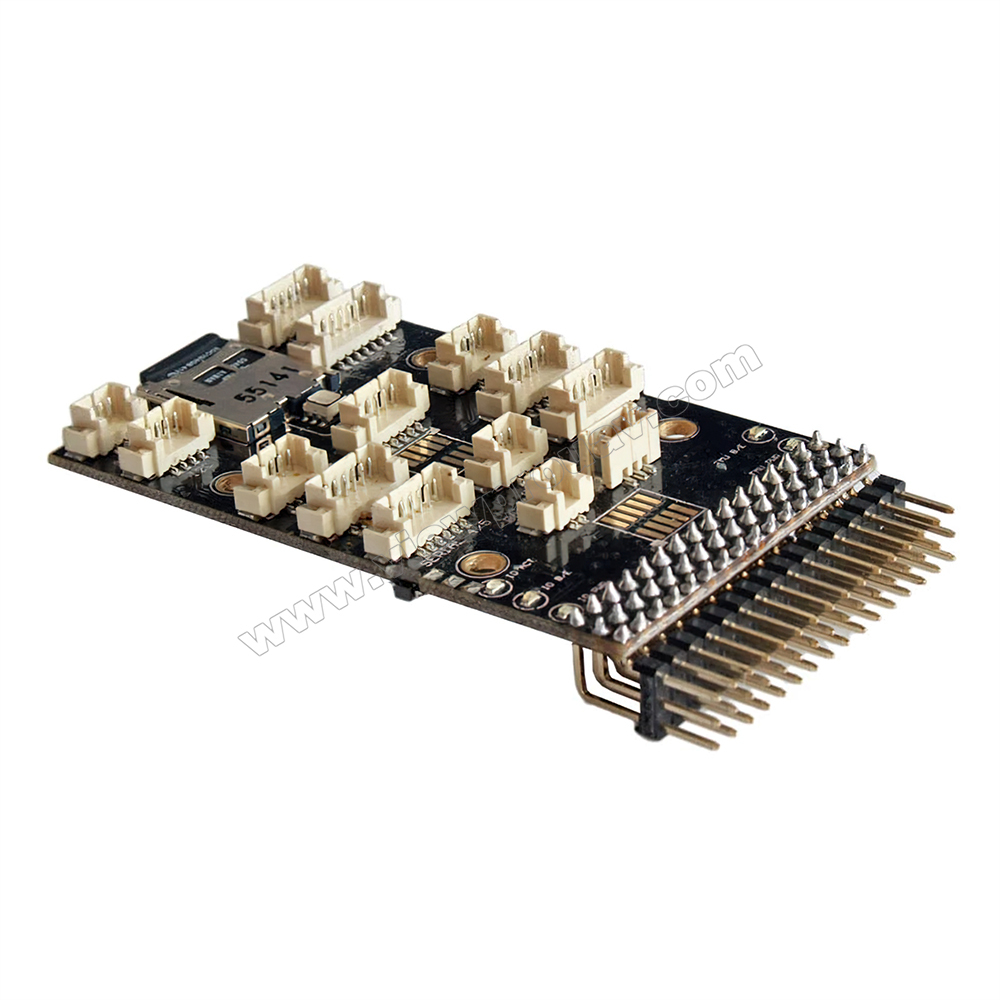



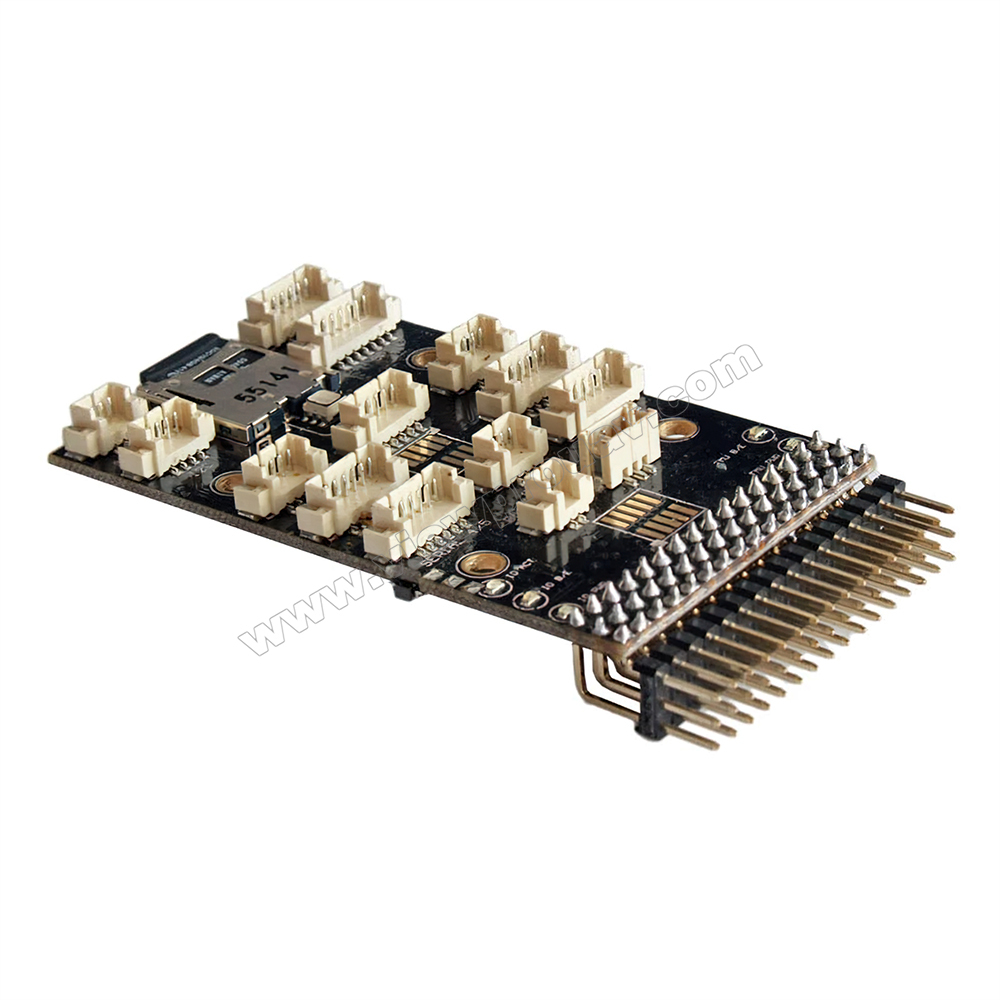

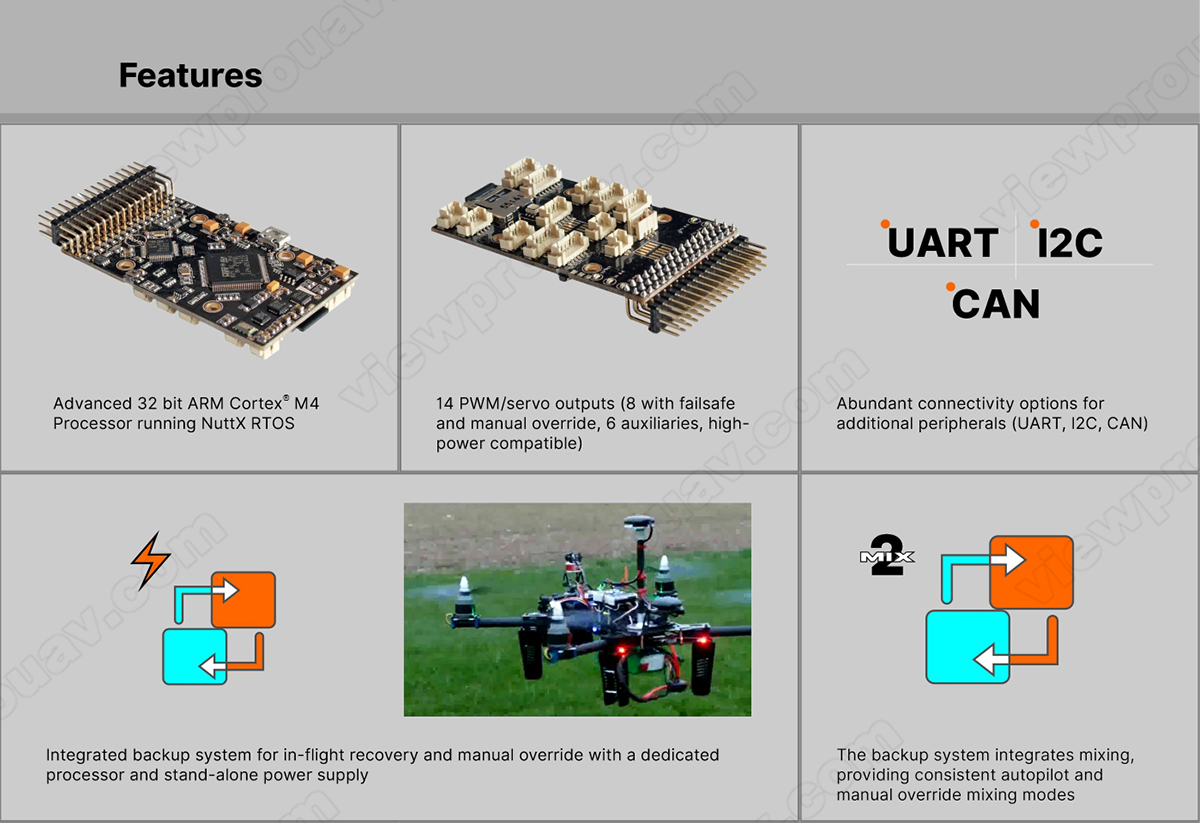
PX4 2.4.8 ออกใหม่โดยผู้ผลิตฮาร์ดแวร์ควบคุมการบินโอเพ่นซอร์สที่มีชื่อเสียง ซึ่งเป็นระบบควบคุมการบินรุ่นใหม่ ใช้โปรเซสเซอร์ ARM 32 บิตประสิทธิภาพสูง และฮาร์ดแวร์ทั้งหมดเป็นโอเพ่นซอร์ส และเปิดเผยชิปและเซ็นเซอร์ที่ใช้ บัสและอุปกรณ์ต่อพ่วงทั้งหมดส่งออก ไม่เพียงแต่เข้ากันได้กับอุปกรณ์ต่อพ่วงอื่นๆ เท่านั้น แต่ยังสะดวกยิ่งขึ้นสำหรับผู้ใช้ที่มีความสามารถในการพัฒนาที่แข็งแกร่ง การควบคุมการบินมีโปรเซสเซอร์คู่ในตัว ซึ่งหนึ่งในนั้นเป็น stm32f427cortex 32 บิตอันทรงพลัง โปรเซสเซอร์ M4 core 168MHz/256KB RAM/2MB Flash อีกตัวหนึ่งเป็นโคโปรเซสเซอร์สำหรับใช้ในอุตสาหกรรม: STM32F103 32 บิต ซึ่งทำงานได้อย่างเสถียรและรับประกันการทำงานที่ปลอดภัย








การแนะนำผลิตภัณฑ์
ข้อมูลจำเพาะ
ข้อมูลจำเพาะของตัวควบคุมการบินโอเพ่นซอร์ส Autopilot PX4 2.4.8
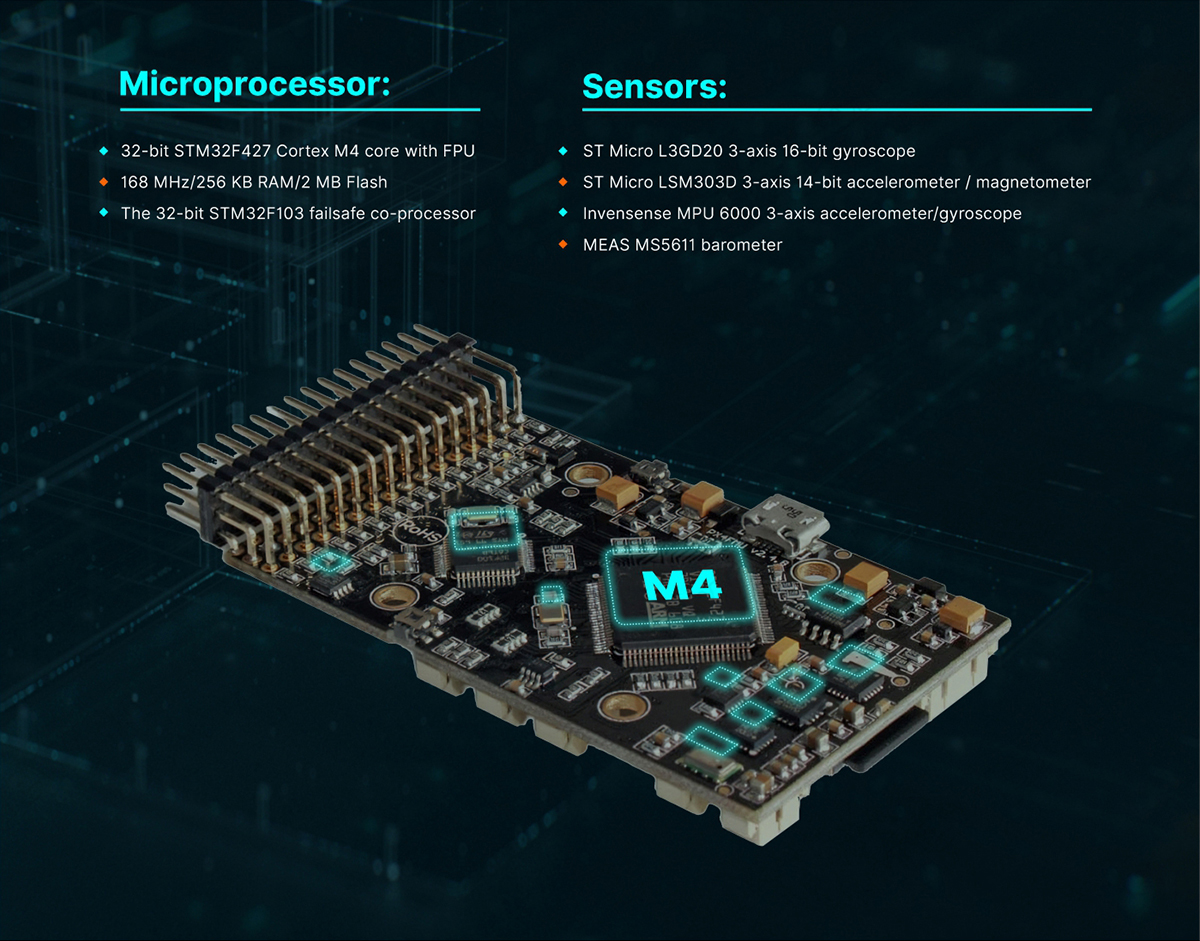
ไมโครโปรเซสเซอร์:
- คอร์ STM32F427 Cortex M4 32 บิตพร้อม FPU
- 168 MHz / 256 KB RAM / 2 MB แฟลช
- โคโปรเซสเซอร์ STM32F103 32 บิตที่ปลอดภัย
เซ็นเซอร์:
- ไจโรสโคป 3 แกน 16 บิต L3GD20
- LSM303D เครื่องวัดความเร่ง 3 แกน 14 บิต / เครื่องวัดสนามแม่เหล็ก
- MPU 6000 เครื่องวัดความเร่ง / ไจโรสโคป 3 แกน
- 5611 ความกดอากาศ
อินเทอร์เฟซ:
- พอร์ต UART (ซีเรียล) 5x, พอร์ตกำลังไฟสูง 1 พอร์ต, พอร์ตควบคุมการไหลของ HW 2x
- กระป๋อง 2x
- อินพุตและเอาต์พุต S.BUS
- สัญญาณผลรวม PPM
- อินพุต RSSI (PWM หรือแรงดันไฟฟ้า)
- ไอทูซี
- เอสพีไอ
- อินพุต ADC 3.3 และ 6.6V
- พอร์ตไมโคร USB ภายนอก
ระบบจ่ายไฟ :
- ตัวควบคุมไดโอดในอุดมคติพร้อมระบบเฟลโอเวอร์อัตโนมัติ
- เซอร์โวเรลกำลังสูง (7 V) และรองรับกระแสไฟสูง
- ป้องกันกระแสไฟเกินจากเอาต์พุตต่อพ่วงทั้งหมด และป้องกัน ESD จากอินพุตทั้งหมด
น้ำหนักและขนาด:
น้ำหนัก: 38กรัม (1.31ออนซ์)
ความกว้าง: 50มม. (1.96")
ความหนา: 15.5มม. (0.61")
ความยาว: 81.5มม. (3.21")
ข้อมูลจำเพาะ GPS
ความแม่นยำความเร็ว: 0.1 ม./วินาที
ความสูงสูงสุด: 50,000 ม.
ความเร็วสูงสุด: 515 ม./วินาที
อัตราเร่งสูงสุด : 4G
อัตราการอัปเดต: 10 Hz
เวลาในการแก้ไขครั้งแรก: สตาร์ทเครื่องเย็น: 26 วินาที สตาร์ทเครื่องร้อน: 1 วินาที
แหล่งจ่ายไฟ: แรงดันไฟฟ้า DC 5V±5%
เส้นผ่านศูนย์กลาง: 54 มม. / 2.126 นิ้ว
ความหนา: 15 มม. / 0.59 นิ้ว
สำหรับรายละเอียดเพิ่มเติม โปรดไปที่PX4 2.4.8 Autopilot Open Source Flight Controller สำหรับนักพัฒนาโดรน
-
การแนะนำผลิตภัณฑ์
-
ข้อมูลจำเพาะ
PX4 2.4.8 ออกใหม่โดยผู้ผลิตฮาร์ดแวร์ควบคุมการบินโอเพ่นซอร์สที่มีชื่อเสียง ซึ่งเป็นระบบควบคุมการบินรุ่นใหม่ ใช้โปรเซสเซอร์ ARM 32 บิตประสิทธิภาพสูง และฮาร์ดแวร์ทั้งหมดเป็นโอเพ่นซอร์ส และเปิดเผยชิปและเซ็นเซอร์ที่ใช้ บัสและอุปกรณ์ต่อพ่วงทั้งหมดส่งออก ไม่เพียงแต่เข้ากันได้กับอุปกรณ์ต่อพ่วงอื่นๆ เท่านั้น แต่ยังสะดวกยิ่งขึ้นสำหรับผู้ใช้ที่มีความสามารถในการพัฒนาที่แข็งแกร่ง การควบคุมการบินมีโปรเซสเซอร์คู่ในตัว ซึ่งหนึ่งในนั้นเป็น stm32f427cortex 32 บิตอันทรงพลัง โปรเซสเซอร์ M4 core 168MHz/256KB RAM/2MB Flash อีกตัวหนึ่งเป็นโคโปรเซสเซอร์สำหรับใช้ในอุตสาหกรรม: STM32F103 32 บิต ซึ่งทำงานได้อย่างเสถียรและรับประกันการทำงานที่ปลอดภัย
ข้อมูลจำเพาะของตัวควบคุมการบินโอเพ่นซอร์ส Autopilot PX4 2.4.8
ไมโครโปรเซสเซอร์:
- คอร์ STM32F427 Cortex M4 32 บิตพร้อม FPU
- 168 MHz / 256 KB RAM / 2 MB แฟลช
- โคโปรเซสเซอร์ STM32F103 32 บิตที่ปลอดภัย
เซ็นเซอร์:
- ไจโรสโคป 3 แกน 16 บิต L3GD20
- LSM303D เครื่องวัดความเร่ง 3 แกน 14 บิต / เครื่องวัดสนามแม่เหล็ก
- MPU 6000 เครื่องวัดความเร่ง / ไจโรสโคป 3 แกน
- 5611 ความกดอากาศ
อินเทอร์เฟซ:
- พอร์ต UART (ซีเรียล) 5x, พอร์ตกำลังไฟสูง 1 พอร์ต, พอร์ตควบคุมการไหลของ HW 2x
- กระป๋อง 2x
- อินพุตและเอาต์พุต S.BUS
- สัญญาณผลรวม PPM
- อินพุต RSSI (PWM หรือแรงดันไฟฟ้า)
- ไอทูซี
- เอสพีไอ
- อินพุต ADC 3.3 และ 6.6V
- พอร์ตไมโคร USB ภายนอก
ระบบจ่ายไฟ :
- ตัวควบคุมไดโอดในอุดมคติพร้อมระบบเฟลโอเวอร์อัตโนมัติ
- เซอร์โวเรลกำลังสูง (7 V) และรองรับกระแสไฟสูง
- ป้องกันกระแสไฟเกินจากเอาต์พุตต่อพ่วงทั้งหมด และป้องกัน ESD จากอินพุตทั้งหมด
น้ำหนักและขนาด:
น้ำหนัก: 38กรัม (1.31ออนซ์)
ความกว้าง: 50มม. (1.96")
ความหนา: 15.5มม. (0.61")
ความยาว: 81.5มม. (3.21")
ข้อมูลจำเพาะ GPS
ความแม่นยำความเร็ว: 0.1 ม./วินาที
ความสูงสูงสุด: 50,000 ม.
ความเร็วสูงสุด: 515 ม./วินาที
อัตราเร่งสูงสุด : 4G
อัตราการอัปเดต: 10 Hz
เวลาในการแก้ไขครั้งแรก: สตาร์ทเครื่องเย็น: 26 วินาที สตาร์ทเครื่องร้อน: 1 วินาที
แหล่งจ่ายไฟ: แรงดันไฟฟ้า DC 5V±5%
เส้นผ่านศูนย์กลาง: 54 มม. / 2.126 นิ้ว
ความหนา: 15 มม. / 0.59 นิ้ว
สำหรับรายละเอียดเพิ่มเติม โปรดไปที่PX4 2.4.8 Autopilot Open Source Flight Controller สำหรับนักพัฒนาโดรน