



















.jpeg?w=1200&h=2526)









การแนะนำผลิตภัณฑ์
ข้อมูลจำเพาะ
ข้อมูลจำเพาะ U30TIRM-HD
| พารามิเตอร์ฮาร์ดแวร์ | |
| แรงดันไฟฟ้าขณะทำงาน | 16โวลต์ |
| แรงดันไฟฟ้าขาเข้า | 4S ~ 6S (14.8 โวลต์ ~ 25.2 โวลต์) |
| แรงดันไฟขาออก | 5V (ต่อกับ PWM) |
| กระแสไฟฟ้าไดนามิค | 850~1500mA ที่ 16V |
| การใช้พลังงาน | เฉลี่ย 13.6W , สูงสุด 24W |
| อุณหภูมิสภาพแวดล้อมการทำงาน | -20℃ ~ +50℃ |
| เอาท์พุต (ตัวเลือก) | IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| การจัดเก็บข้อมูลในเครื่อง | การ์ด TF (สูงสุด 512G, คลาส 10, รูปแบบ FAT32) |
| รูปแบบการจัดเก็บภาพในการ์ด TF | JPG(1920*1080) |
| รูปแบบการจัดเก็บวิดีโอในการ์ด TF | MP4 (1080P 30เฟรมต่อวินาที) |
| วิธีการควบคุม | PWM / TTL / S.BUS / TCP / UDP |
| สเปคของกิมบอล | |
| เครื่องจักรกล | มุมเอียง/เอียง: -45°~135° , หันเห/แพน: ±360°*N |
| ระยะควบคุมได้ | มุมเอียง/เอียง: -40°~130° , หันเห/แพน: ±360°*N |
| มุมการสั่นสะเทือน | มุมเอียง/โค้ง/หัน: ±0.02° |
| ปุ่มเดียวสู่ศูนย์กลาง | √ |
| ข้อมูลจำเพาะกล้อง EO | |
| เซ็นเซอร์รับภาพ | เซ็นเซอร์ CMOS ชนิด STARVIS2 ขนาด 1/2.8 |
| คุณภาพของภาพ | ฟูลเอชดี 1080 (1920*1080) |
| พิกเซลที่มีประสิทธิภาพ | 2.13 ล้านพิกเซล |
| เลนส์ซูมออปติคอล | 30x, รูรับแสง = 4.3 ~ 129 มม. |
| ซูมดิจิตอล | 12x (360x พร้อมซูมออปติคอล) |
| ระยะห่างวัตถุน้อยที่สุด | 10มม. (ปลายกว้าง) ถึง 1200มม. (ปลายเทเล) |
| มุมมองแนวนอน | 64.0°(ปลายกว้าง) ~ 2.4°(ปลายเทเล) |
| อัตราส่วน S/N | มากกว่า 50dB |
| แสงสว่างขั้นต่ำ | สี 0.009 ลักซ์ (1/30 วินาที, 50%, เปิดโหมดความไวสูง) |
| สี 0.09 ลักซ์ (1/30 วินาที, 50%, โหมดความไวแสงสูง ปิด) | |
| การควบคุมการรับแสง | อัตโนมัติ, แมนนวล, โหมดความสำคัญ (เน้นชัตเตอร์และเน้นไอริส), การชดเชย EV, AE ช้า |
| ได้รับ | อัตโนมัติ/ด้วยตนเอง 0dB ถึง 50.0dB (0 ถึง 28 ขั้น) ขีดจำกัดเกนสูงสุด 10.7 dB ถึง 50.0dB (6 ถึง 28 ขั้น) |
| สมดุลแสงขาว | อัตโนมัติ, ATW, ในร่ม, กลางแจ้ง, WB แบบกดครั้งเดียว, WB แบบแมนนวล, อัตโนมัติกลางแจ้ง, หลอดไฟโซเดียมไอระเหย |
| ความเร็วชัตเตอร์ | 1/1 วินาทีถึง 1/10,000 วินาที 22 ขั้นตอน |
| การชดเชยแสงด้านหลัง | เปิด/ปิด |
| ลดเสียงรบกวน | เปิด/ปิด |
| ระบบป้องกันภาพสั่นไหว | เปิด/ปิด |
| เดฟ็อก | เปิด/ปิด |
| ข้อมูลจำเพาะของกล้องถ่ายภาพความร้อนแบบ IR | |
| ความยาวโฟกัส | 50มม. |
| มุมมองแนวนอน | 17.5° |
| FOV แนวตั้ง | 14.0° |
| ระยะตรวจจับ (ชาย : 1.8x0.5ม.) | 2083 เมตร |
| รู้จักระยะทาง (ชาย : 1.8x0.5ม.) | 521 เมตร |
| ระยะทางที่ตรวจสอบ (ชาย: 1.8x0.5ม.) | 260 เมตร |
| ระยะตรวจจับ (รถยนต์ : 4.2x1.8ม.) | 6389 เมตร |
| จดจำระยะทาง (รถ: 4.2x1.8ม.) | 1,597 เมตร |
| ระยะทางที่ตรวจสอบ (รถ: 4.2x1.8ม.) | 799 เมตร |
| โหมดการทำงาน | กล้องถ่ายภาพความร้อนแบบคลื่นยาวที่ไม่มีการระบายความร้อน (8μm~14μm) |
| พิกเซลตรวจจับ | 1280*1024 |
| พิกเซลพิทช์ | 12ไมโครเมตร |
| วิธีการโฟกัส | เลนส์ไพรม์อะเทอร์มอล |
| เน็ตดี | ≤40mK@25℃,ฟาเรนไฮต์ #1.0 |
| กรมขนส่งทางบก | ≤400mK@25℃,ฟาเรนไฮต์ #1.0 |
| ชัตเตอร์ | ชัตเตอร์แบบ Bistable |
| จานสี | สีขาว, สีดำ, สีเทียม |
| ซูมดิจิตอล | 1x ~ 4x |
| ประเภทเทอร์โมมิเตอร์ | ไม่รองรับ |
| การติดตามวัตถุด้วยกล้อง EO/IR | |
| อัตราการอัพเดทค่าเบี่ยงเบนของพิกเซล | 50เฮิรตซ์ |
| ความล่าช้าของเอาต์พุตของพิกเซลเบี่ยงเบน | 5มิลลิวินาที |
| ความคมชัดของวัตถุขั้นต่ำ | 5% |
| สแนร์ | 4 |
| ขนาดวัตถุขั้นต่ำ | 32*32 พิกเซล |
| ขนาดวัตถุสูงสุด | 128*128 พิกเซล |
| ความเร็วในการติดตาม | ±48 พิกเซลต่อเฟรม |
| เวลาหน่วยความจำของวัตถุ | 100 เฟรม (4 วินาที) |
| ค่าเฉลี่ยรากที่สองของสัญญาณ รบกวนพัลส์ในตำแหน่งวัตถุ |
< 0.5 พิกเซล |
| เครื่องวัดระยะเลเซอร์อินฟราเรด | |
| การวัดความสามารถ | ≥5 กม. สำหรับเป้าหมายขนาดใหญ่ (เช่น อาคาร) ≥3 กม. สำหรับรถยนต์ (2.3 ม. × 2.3 ม.) ≥1.5 กม. สำหรับบุคคล (1.75 ม. × 0.75 ม.) (อิงตามค่าทั่วไป: ความ สามารถในการมองเห็น LOS: ≥8 กม. อัตราการสะท้อนแบบกระจาย: ≥0.3 ความสุภาพถ่อมตน: ≤80%) |
| ความแม่นยำ (ค่าทั่วไป) | ≤ ±1ม. (RMS) |
| ความยาวคลื่น | เลเซอร์พัลส์ 1535 นาโนเมตร |
| มุมแยก | ≤ 0.5 มิลลิเรเดียน |
| ความถี่ในการวัด | 1~10เฮิรตซ์ |
| ช่วงการวัดขั้นต่ำ | ≤20ม. |
| การระบุตำแหน่ง | ละติจูดและลองจิจูดของเป้าหมาย |
| เรนไฟน์เดอร์ | วัดระยะทางระหว่างวัตถุที่อยู่ตรงกลางหน้าจอและเครื่องวัดระยะด้วยเลเซอร์ |
| คุณสมบัติ | |
| โอเอสดี | แสดงมุมหันและมุมพิทช์ของกิมบอล กำลังขยาย ค่าการวัดระยะ ระยะเวลาที่บันทึกการ์ด GPS และระดับความสูงของเครื่องบิน หรือจุดวัดระยะเป้าหมาย GPS และระดับความสูง (เลือกอย่างใดอย่างหนึ่ง และ t t i i t GPS d ltit d ) d t d ti |
| การแท็กตำแหน่งทางภูมิศาสตร์ | Dairsgpela atni npdo PS co rndin teuin ict r xnif ฉัน |
| การอ่านไพ่ออนไลน์ | SMB อ่านภาพหรือวิดีโอ / HTTP อ่านภาพหรือวิดีโอ |
| กัวลาลัมเปอร์ (UDP) | การบันทึกการ์ดหรือการเล่นวิดีโอ Viewlink |
| อาร์ดูไพลอต / PX4 | รองรับ (โปรโตคอล Mavlink) ตัวเลือก: รองรับฟีเจอร์ติดตามฉันของ Ardupilot |
| การเย็บวิดีโอ | อีโอ+ไออาร์ /ไออาร์+อีโอ /อีโอ /ไออาร์ |
| เอาท์พุตวิดีโอสตรีมคู่ | ไม่รองรับ (EO และ IR สองสตรีมเอาท์พุต) |
| ข้อมูลการบรรจุ | |
| ตะวันตกเฉียงเหนือ | 1625±10g (เวอร์ชันช่องมองภาพพร้อมช่องมองภาพ) |
| ขนาดผลิตภัณฑ์ | 155*143.5*232.1 มม. / 155*143.5*237.8 มม. (เวอร์ชันช่องมองภาพพร้อมช่องมองภาพ) |
| เครื่องประดับ | อุปกรณ์กล้องกันสั่น 1 ชิ้น, สกรู, กระบอกทองแดง, ลูกบอลลดแรงสั่นสะเทือน, สาย USB ถึง TTL 1 ชิ้น / กล่องพลาสติกคุณภาพสูงพร้อมเบาะโฟม |
| จีดับบลิว | 3352กรัม |
| ขนาดแพ็คเกจ | 350*300*250มม. |
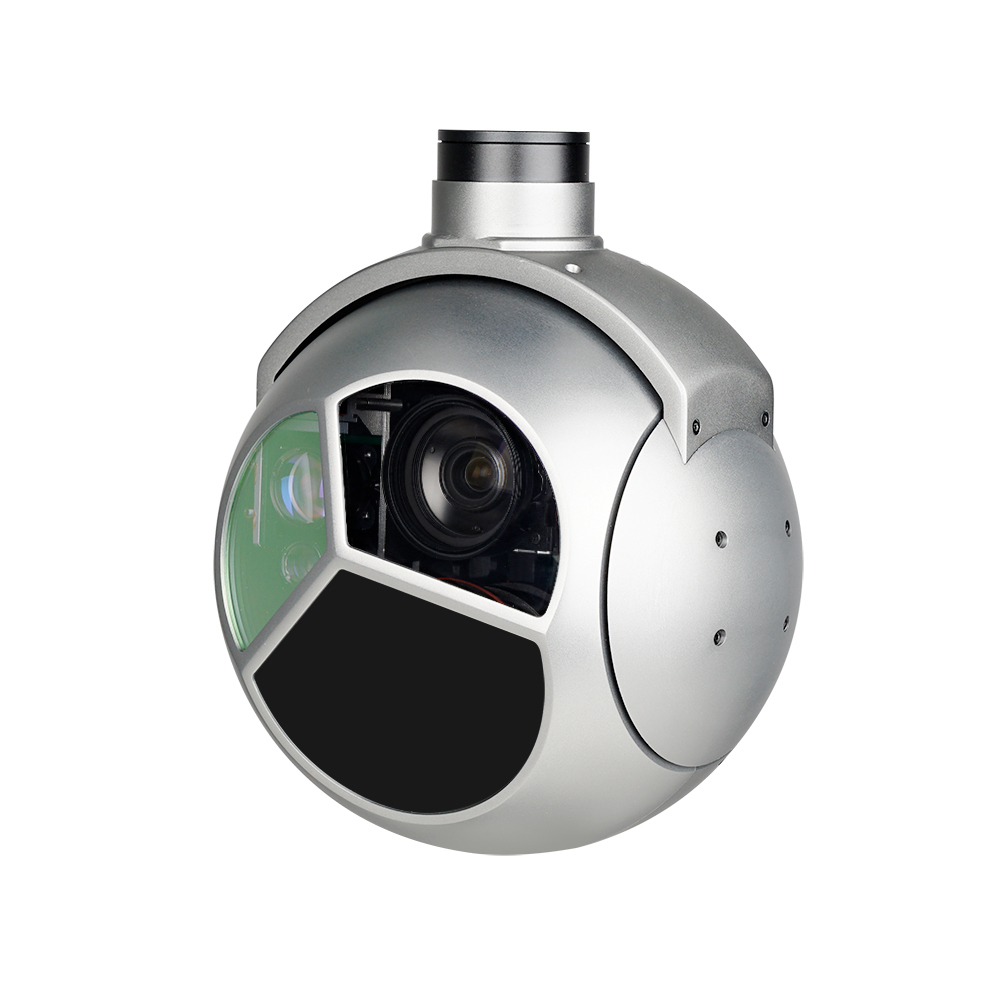
สำหรับรายละเอียดเพิ่มเติม โปรดไปที่U30TIRM-HD ความคมชัดสูง 1280 lR เซ็นเซอร์สามตัวสำหรับการมองเห็นในเวลากลางคืนแบบ Starlight ซูมออปติคอล 30 เท่า พร้อมระบบติดตามวัตถุ และกล้อง Gimbal LRF ระยะ 5,000 ม.
-
การแนะนำผลิตภัณฑ์
-
ข้อมูลจำเพาะ
ข้อมูลจำเพาะ U30TIRM-HD
| พารามิเตอร์ฮาร์ดแวร์ | |
| แรงดันไฟฟ้าขณะทำงาน | 16โวลต์ |
| แรงดันไฟฟ้าขาเข้า | 4S ~ 6S (14.8 โวลต์ ~ 25.2 โวลต์) |
| แรงดันไฟขาออก | 5V (ต่อกับ PWM) |
| กระแสไฟฟ้าไดนามิค | 850~1500mA ที่ 16V |
| การใช้พลังงาน | เฉลี่ย 13.6W , สูงสุด 24W |
| อุณหภูมิสภาพแวดล้อมการทำงาน | -20℃ ~ +50℃ |
| เอาท์พุต (ตัวเลือก) | IP (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| การจัดเก็บข้อมูลในเครื่อง | การ์ด TF (สูงสุด 512G, คลาส 10, รูปแบบ FAT32) |
| รูปแบบการจัดเก็บภาพในการ์ด TF | JPG(1920*1080) |
| รูปแบบการจัดเก็บวิดีโอในการ์ด TF | MP4 (1080P 30เฟรมต่อวินาที) |
| วิธีการควบคุม | PWM / TTL / S.BUS / TCP / UDP |
| สเปคของกิมบอล | |
| เครื่องจักรกล | มุมเอียง/เอียง: -45°~135° , หันเห/แพน: ±360°*N |
| ระยะควบคุมได้ | มุมเอียง/เอียง: -40°~130° , หันเห/แพน: ±360°*N |
| มุมการสั่นสะเทือน | มุมเอียง/โค้ง/หัน: ±0.02° |
| ปุ่มเดียวสู่ศูนย์กลาง | √ |
| ข้อมูลจำเพาะกล้อง EO | |
| เซ็นเซอร์รับภาพ | เซ็นเซอร์ CMOS ชนิด STARVIS2 ขนาด 1/2.8 |
| คุณภาพของภาพ | ฟูลเอชดี 1080 (1920*1080) |
| พิกเซลที่มีประสิทธิภาพ | 2.13 ล้านพิกเซล |
| เลนส์ซูมออปติคอล | 30x, รูรับแสง = 4.3 ~ 129 มม. |
| ซูมดิจิตอล | 12x (360x พร้อมซูมออปติคอล) |
| ระยะห่างวัตถุน้อยที่สุด | 10มม. (ปลายกว้าง) ถึง 1200มม. (ปลายเทเล) |
| มุมมองแนวนอน | 64.0°(ปลายกว้าง) ~ 2.4°(ปลายเทเล) |
| อัตราส่วน S/N | มากกว่า 50dB |
| แสงสว่างขั้นต่ำ | สี 0.009 ลักซ์ (1/30 วินาที, 50%, เปิดโหมดความไวสูง) |
| สี 0.09 ลักซ์ (1/30 วินาที, 50%, โหมดความไวแสงสูง ปิด) | |
| การควบคุมการรับแสง | อัตโนมัติ, แมนนวล, โหมดความสำคัญ (เน้นชัตเตอร์และเน้นไอริส), การชดเชย EV, AE ช้า |
| ได้รับ | อัตโนมัติ/ด้วยตนเอง 0dB ถึง 50.0dB (0 ถึง 28 ขั้น) ขีดจำกัดเกนสูงสุด 10.7 dB ถึง 50.0dB (6 ถึง 28 ขั้น) |
| สมดุลแสงขาว | อัตโนมัติ, ATW, ในร่ม, กลางแจ้ง, WB แบบกดครั้งเดียว, WB แบบแมนนวล, อัตโนมัติกลางแจ้ง, หลอดไฟโซเดียมไอระเหย |
| ความเร็วชัตเตอร์ | 1/1 วินาทีถึง 1/10,000 วินาที 22 ขั้นตอน |
| การชดเชยแสงด้านหลัง | เปิด/ปิด |
| ลดเสียงรบกวน | เปิด/ปิด |
| ระบบป้องกันภาพสั่นไหว | เปิด/ปิด |
| เดฟ็อก | เปิด/ปิด |
| ข้อมูลจำเพาะของกล้องถ่ายภาพความร้อนแบบ IR | |
| ความยาวโฟกัส | 50มม. |
| มุมมองแนวนอน | 17.5° |
| FOV แนวตั้ง | 14.0° |
| ระยะตรวจจับ (ชาย : 1.8x0.5ม.) | 2083 เมตร |
| รู้จักระยะทาง (ชาย : 1.8x0.5ม.) | 521 เมตร |
| ระยะทางที่ตรวจสอบ (ชาย: 1.8x0.5ม.) | 260 เมตร |
| ระยะตรวจจับ (รถยนต์ : 4.2x1.8ม.) | 6389 เมตร |
| จดจำระยะทาง (รถ: 4.2x1.8ม.) | 1,597 เมตร |
| ระยะทางที่ตรวจสอบ (รถ: 4.2x1.8ม.) | 799 เมตร |
| โหมดการทำงาน | กล้องถ่ายภาพความร้อนแบบคลื่นยาวที่ไม่มีการระบายความร้อน (8μm~14μm) |
| พิกเซลตรวจจับ | 1280*1024 |
| พิกเซลพิทช์ | 12ไมโครเมตร |
| วิธีการโฟกัส | เลนส์ไพรม์อะเทอร์มอล |
| เน็ตดี | ≤40mK@25℃,ฟาเรนไฮต์ #1.0 |
| กรมขนส่งทางบก | ≤400mK@25℃,ฟาเรนไฮต์ #1.0 |
| ชัตเตอร์ | ชัตเตอร์แบบ Bistable |
| จานสี | สีขาว, สีดำ, สีเทียม |
| ซูมดิจิตอล | 1x ~ 4x |
| ประเภทเทอร์โมมิเตอร์ | ไม่รองรับ |
| การติดตามวัตถุด้วยกล้อง EO/IR | |
| อัตราการอัพเดทค่าเบี่ยงเบนของพิกเซล | 50เฮิรตซ์ |
| ความล่าช้าของเอาต์พุตของพิกเซลเบี่ยงเบน | 5มิลลิวินาที |
| ความคมชัดของวัตถุขั้นต่ำ | 5% |
| สแนร์ | 4 |
| ขนาดวัตถุขั้นต่ำ | 32*32 พิกเซล |
| ขนาดวัตถุสูงสุด | 128*128 พิกเซล |
| ความเร็วในการติดตาม | ±48 พิกเซลต่อเฟรม |
| เวลาหน่วยความจำของวัตถุ | 100 เฟรม (4 วินาที) |
| ค่าเฉลี่ยรากที่สองของสัญญาณ รบกวนพัลส์ในตำแหน่งวัตถุ |
< 0.5 พิกเซล |
| เครื่องวัดระยะเลเซอร์อินฟราเรด | |
| การวัดความสามารถ | ≥5 กม. สำหรับเป้าหมายขนาดใหญ่ (เช่น อาคาร) ≥3 กม. สำหรับรถยนต์ (2.3 ม. × 2.3 ม.) ≥1.5 กม. สำหรับบุคคล (1.75 ม. × 0.75 ม.) (อิงตามค่าทั่วไป: ความ สามารถในการมองเห็น LOS: ≥8 กม. อัตราการสะท้อนแบบกระจาย: ≥0.3 ความสุภาพถ่อมตน: ≤80%) |
| ความแม่นยำ (ค่าทั่วไป) | ≤ ±1ม. (RMS) |
| ความยาวคลื่น | เลเซอร์พัลส์ 1535 นาโนเมตร |
| มุมแยก | ≤ 0.5 มิลลิเรเดียน |
| ความถี่ในการวัด | 1~10เฮิรตซ์ |
| ช่วงการวัดขั้นต่ำ | ≤20ม. |
| การระบุตำแหน่ง | ละติจูดและลองจิจูดของเป้าหมาย |
| เรนไฟน์เดอร์ | วัดระยะทางระหว่างวัตถุที่อยู่ตรงกลางหน้าจอและเครื่องวัดระยะด้วยเลเซอร์ |
| คุณสมบัติ | |
| โอเอสดี | แสดงมุมหันและมุมพิทช์ของกิมบอล กำลังขยาย ค่าการวัดระยะ ระยะเวลาที่บันทึกการ์ด GPS และระดับความสูงของเครื่องบิน หรือจุดวัดระยะเป้าหมาย GPS และระดับความสูง (เลือกอย่างใดอย่างหนึ่ง และ t t i i t GPS d ltit d ) d t d ti |
| การแท็กตำแหน่งทางภูมิศาสตร์ | Dairsgpela atni npdo PS co rndin teuin ict r xnif ฉัน |
| การอ่านไพ่ออนไลน์ | SMB อ่านภาพหรือวิดีโอ / HTTP อ่านภาพหรือวิดีโอ |
| กัวลาลัมเปอร์ (UDP) | การบันทึกการ์ดหรือการเล่นวิดีโอ Viewlink |
| อาร์ดูไพลอต / PX4 | รองรับ (โปรโตคอล Mavlink) ตัวเลือก: รองรับฟีเจอร์ติดตามฉันของ Ardupilot |
| การเย็บวิดีโอ | อีโอ+ไออาร์ /ไออาร์+อีโอ /อีโอ /ไออาร์ |
| เอาท์พุตวิดีโอสตรีมคู่ | ไม่รองรับ (EO และ IR สองสตรีมเอาท์พุต) |
| ข้อมูลการบรรจุ | |
| ตะวันตกเฉียงเหนือ | 1625±10g (เวอร์ชันช่องมองภาพพร้อมช่องมองภาพ) |
| ขนาดผลิตภัณฑ์ | 155*143.5*232.1 มม. / 155*143.5*237.8 มม. (เวอร์ชันช่องมองภาพพร้อมช่องมองภาพ) |
| เครื่องประดับ | อุปกรณ์กล้องกันสั่น 1 ชิ้น, สกรู, กระบอกทองแดง, ลูกบอลลดแรงสั่นสะเทือน, สาย USB ถึง TTL 1 ชิ้น / กล่องพลาสติกคุณภาพสูงพร้อมเบาะโฟม |
| จีดับบลิว | 3352กรัม |
| ขนาดแพ็คเกจ | 350*300*250มม. |
สำหรับรายละเอียดเพิ่มเติม โปรดไปที่U30TIRM-HD ความคมชัดสูง 1280 lR เซ็นเซอร์สามตัวสำหรับการมองเห็นในเวลากลางคืนแบบ Starlight ซูมออปติคอล 30 เท่า พร้อมระบบติดตามวัตถุ และกล้อง Gimbal LRF ระยะ 5,000 ม.