









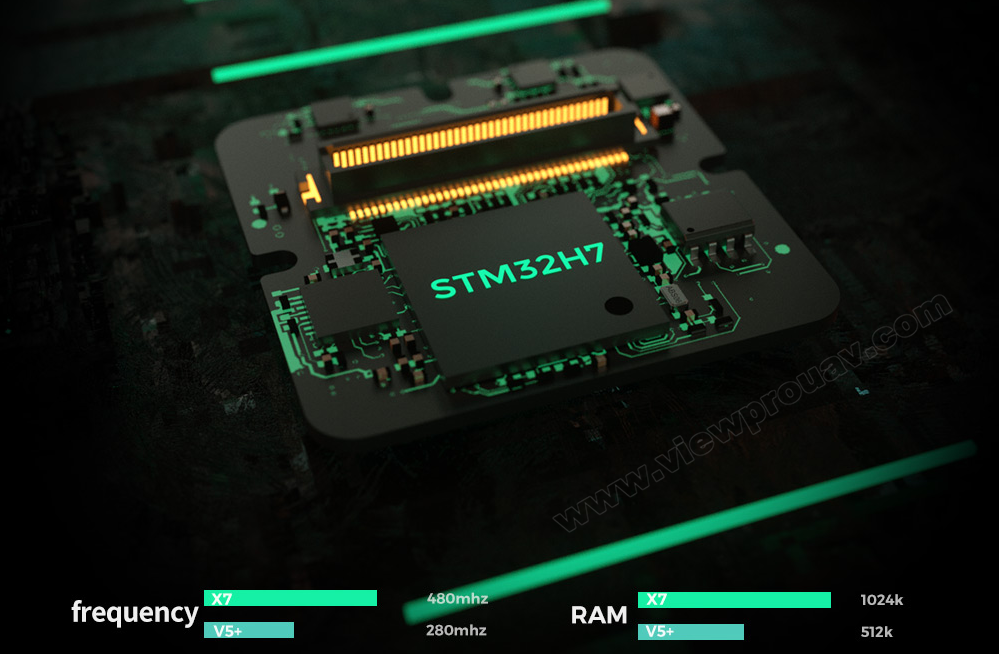
Her zamankinden daha hızlı
X7 serisi otopilot STM32H7 serisi işlemcileri kullanır, CPU çalışma frekansı 480 Mhz'e yükseltilir, depolama 1024K, FLASH 2048K, daha hızlı bir işlemciye ve daha büyük depolama alanına sahiptir ve 512K EEPROM kullanır, rota noktalarını 2048'e kadar genişletebilir, uçuş uygulamalarına daha fazla hayal gücü getirin
Zorlu ortama uyum sağlayın
x7 serisi otopilot, çok sayıda araç seviyesindeki çipi benimser ve sensörün yüksek ve düşük sıcaklık ortamlarında yüksek doğruluk ve hassasiyetle çalışmasını sağlamak için sensörün sabit bir sıcaklıkta çalışmasını sağlayan yerleşik yüksek hassasiyetli sensör sıcaklık telafi sistemine sahiptir.
Her zaman istikrarlı
Daha düşük gürültü ve daha güçlü anti-şok ve titreşim performansına sahip olan Invensense + Bosch + ADI+ TE serisi sensörler kullanılır. Endüstriyel sınıf pusula RM3100 ile uçuş kararlılığı ve anti-parazit performansı niteliksel bir iyileştirme sağlamıştır

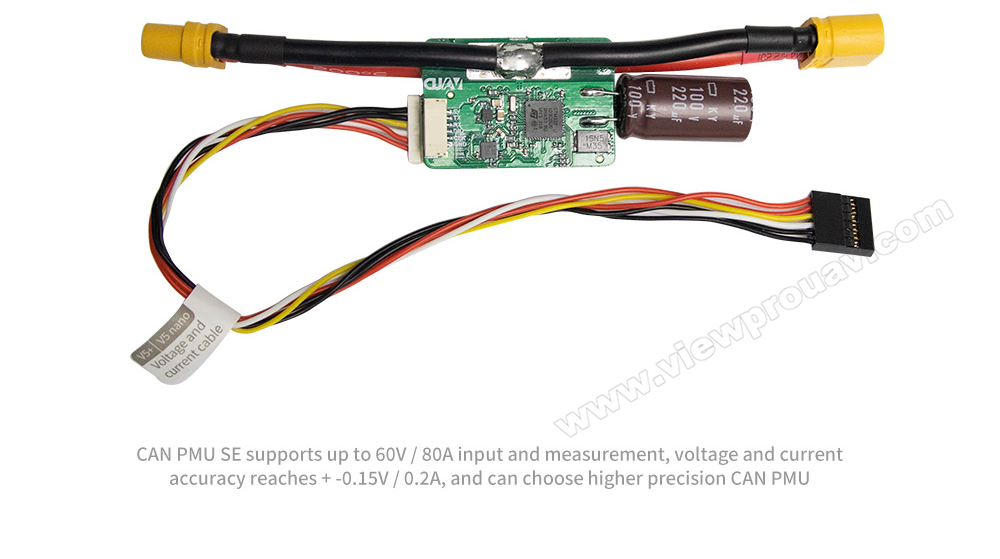
Dijital güç modülü ile standart paketleme listesi
Varsayılan paketleme listesi, UAVCAN protokolü dijital PMU-SE dijital güç algılama modülünü, dahili CUAV kendi geliştirdiği ITT algoritmasını içerir, İHA'nın gerçek zamanlı voltajını ve akımını doğru bir şekilde ölçmeye yardımcı olur ve uçuş süresi tahminini daha güvenilir hale getirir.
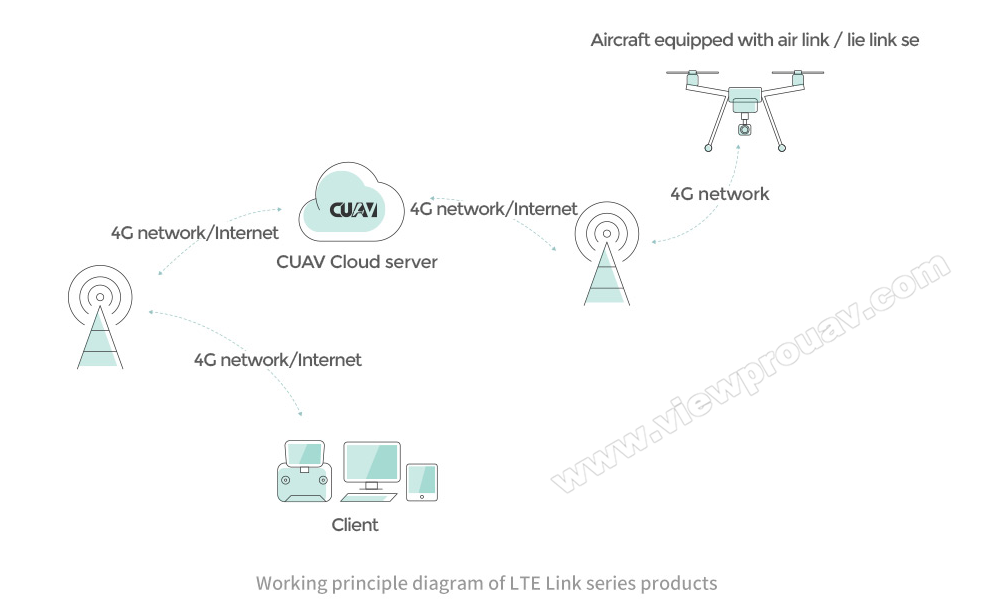
İsteğe bağlı:CUAV Bulut erişim donanımı LTE Bağlantısı
Tüm CUAV serisi otopilotlar, Lei Xun bulut platformunun LTE Link serisi iletişim bağlantılarını destekler. 4G ve 5G ağları üzerinden iletişim kurarlar, mesafe olmadan kontrol ederler, gerçek zamanlı yüksek çözünürlüklü video iletimi ve video paylaşımını desteklerler ve izin tahsisini ve drone Ekibi yönetim işlevlerini desteklerler.
İHACAN protokolü
UAVCAN standart protokolü, yüksek
gerçek zamanlı, güçlü anti-parazit
Dahili yüksek hassasiyetli barometre
Farklı uygulama senaryolarının ihtiyaçlarını karşılamak için dahili yüksek hassasiyetli barometre

NEO V2 Pro, uzaktan kumanda, dijital iletim ve 4G sinyallerinin GpS konumlandırma alımı üzerindeki etkisini etkili bir şekilde önleyen SAW + LNA + SAW çift filtreleme tasarımını benimser.

Program açık kaynaklıdır, özel programları destekler