7. س: كيفية إعداد التحكم في الطيران مفتوح المصدر لحل مشكلة إمالة محور الدوران للمحور المحوري عندما يدور الجناح الثابت بسرعة كبيرة؟
إجابة:
قم بتوصيل منفذ gimbal التسلسلي بجهاز TELEM الخاص بجهاز التحكم في الطيران مفتوح المصدر (على سبيل المثال: Pixhawk) للتعويض عن انحراف الأفق أثناء الطيران الديناميكي العالي.
إعدادات معلمات منفذ FC TELEM: معدل الباود 115200، MAvlink1.
ضبط المعلمات في ArduPilot:
•المسلسلx_BAUD = 115
•البروتوكول التسلسلي x = 1
حيث "x" هو رقم المنفذ. القيمة هي 1 (Mavlink).
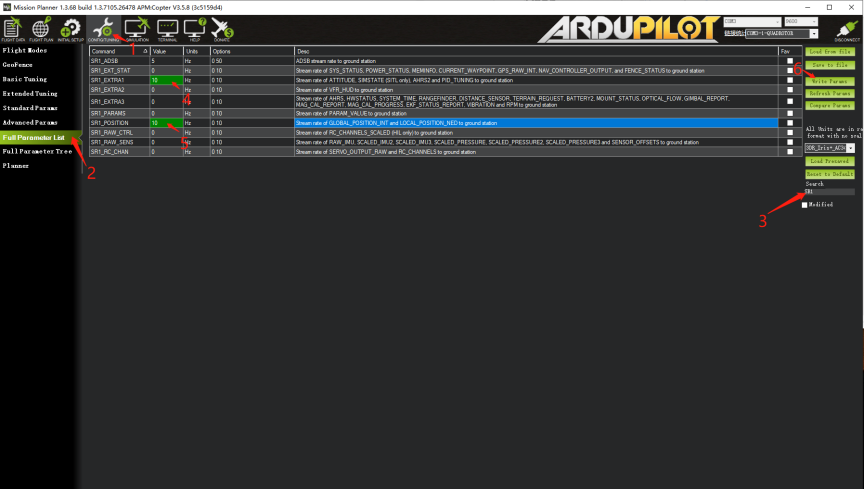
بالإضافة إلى ذلك، قم بتعيين معدلات الرسائل التالية لهذا المنفذ:
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
ملاحظة: يجب ضبط جميع معلمات SRx_xx الأخرى على 0 لمنع البيانات غير الضرورية من زيادة تحميل القناة.