









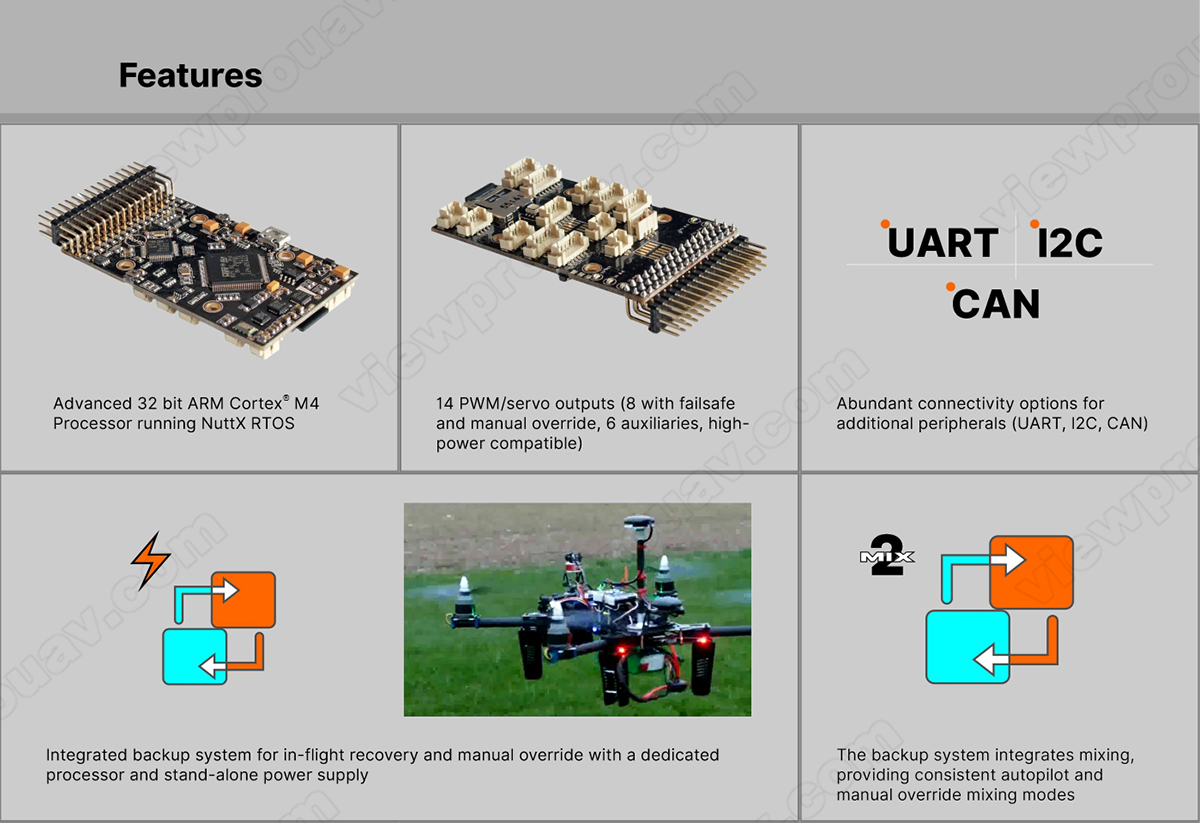
تم إصدار PX4 2.4.8 حديثًا من قبل الشركة المصنعة لأجهزة التحكم في الطيران مفتوحة المصدر الشهيرة، وهو جيل جديد من أنظمة التحكم في الطيران. إنه يعتمد على معالج ARM عالي الأداء 32 بت، وجميع الأجهزة مفتوحة المصدر، والرقائق وأجهزة الاستشعار المستخدمة معلنة. يتم تصدير جميع الحافلات والأجهزة الطرفية، وهي ليست متوافقة مع الأجهزة الطرفية الأخرى فحسب، بل إنها أيضًا أكثر ملاءمة للمستخدمين الذين لديهم قدرات تطوير قوية. يحتوي التحكم في الطيران على معالجين مزدوجين مدمجين، أحدهما معالج قوي 32 بت stm32f427cortex، M4 core 168MHz/256KB RAM/2MB Flash؛ والآخر هو معالج مساعد للاستخدام الصناعي: 32 بت STM32F103، والذي يعمل بثبات ويضمن التشغيل الآمن.








مقدمة المنتج
مواصفة
مواصفات وحدة التحكم في الطيران مفتوحة المصدر PX4 2.4.8 Autopilot
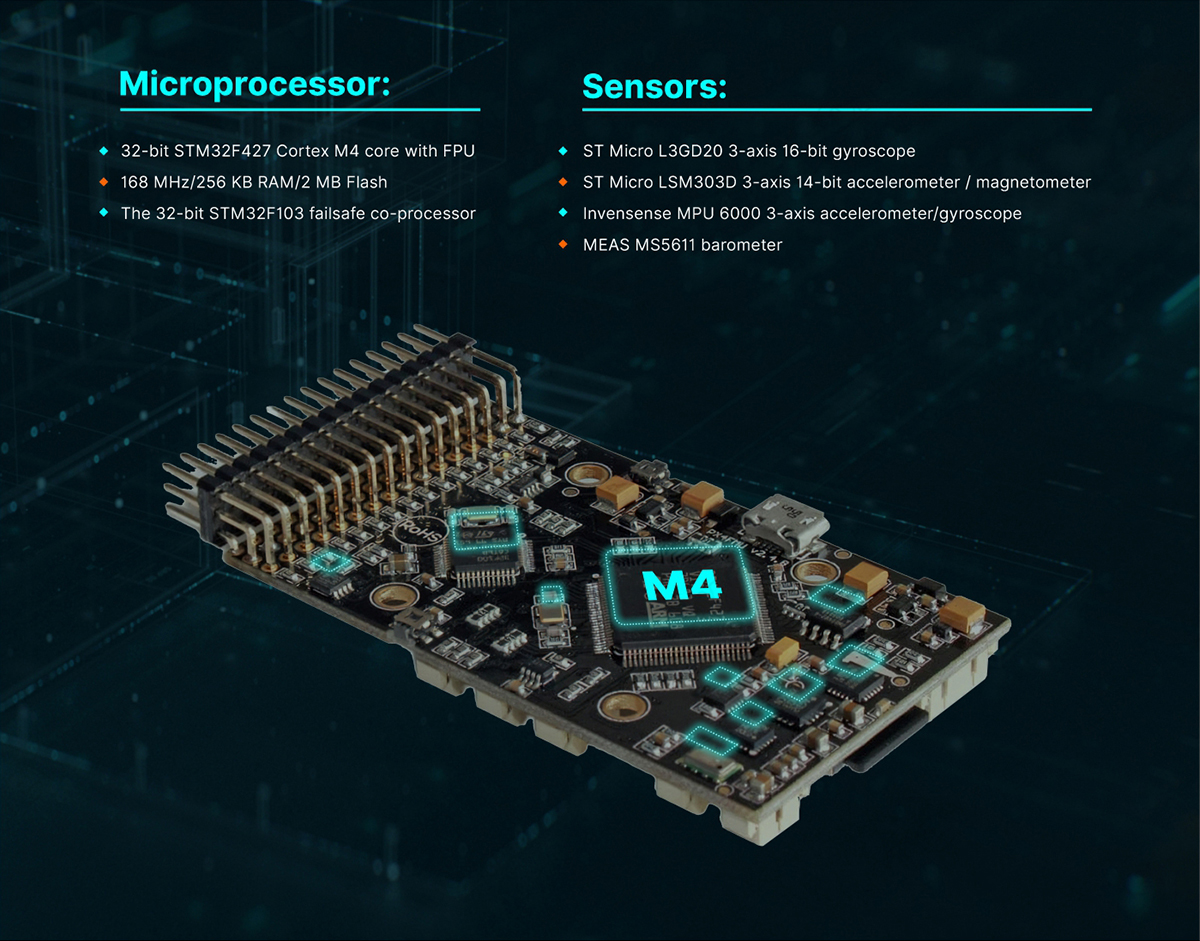
المعالج الدقيق:
- نواة STM32F427 Cortex M4 ذات 32 بت مع وحدة النقطة العائمة
- 168 ميجا هرتز / 256 كيلوبايت ذاكرة وصول عشوائي / 2 ميجا بايت فلاش
- معالج مساعد STM32F103 آمن 32 بت
أجهزة الاستشعار:
- جيروسكوب L3GD20 ثلاثي المحاور 16 بت
- مقياس تسارع/مغناطيسية ثلاثي المحاور LSM303D بدقة 14 بت
- مقياس تسارع / جيروسكوب ثلاثي المحاور MPU 6000
- 5611 بارومتر
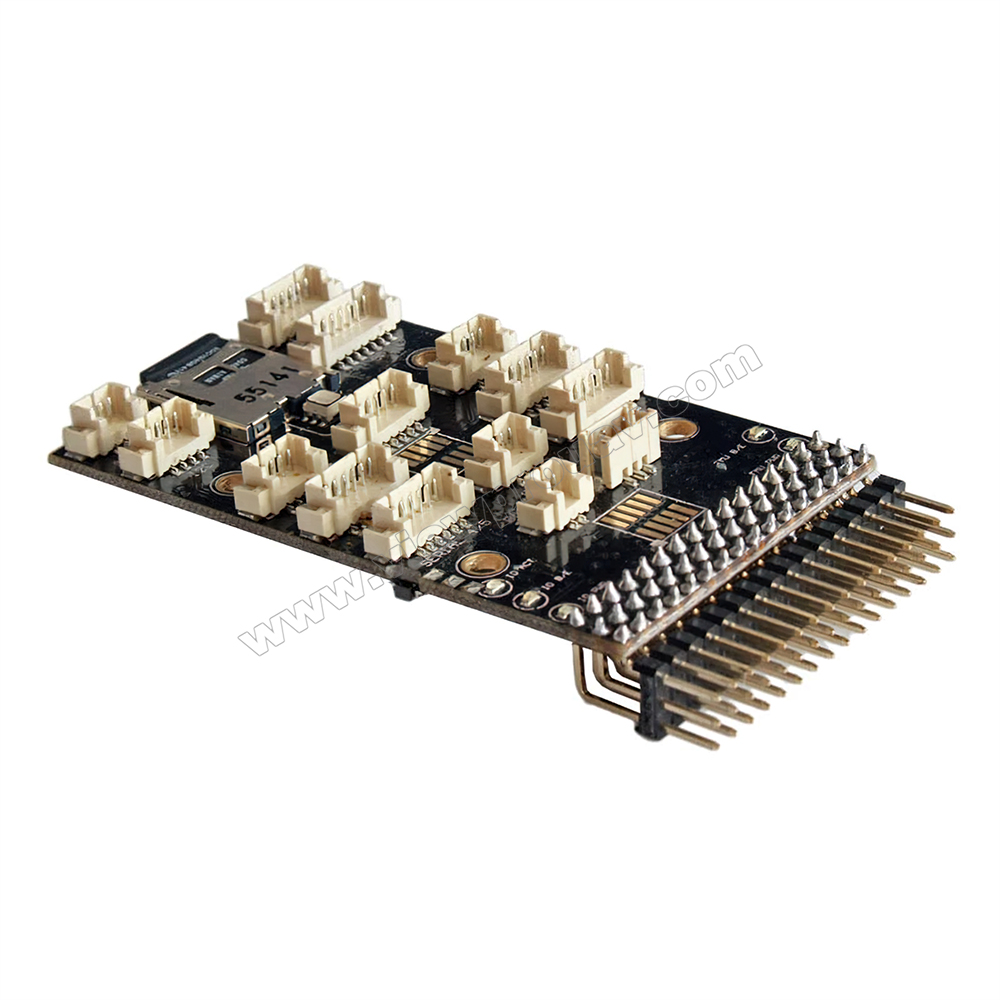
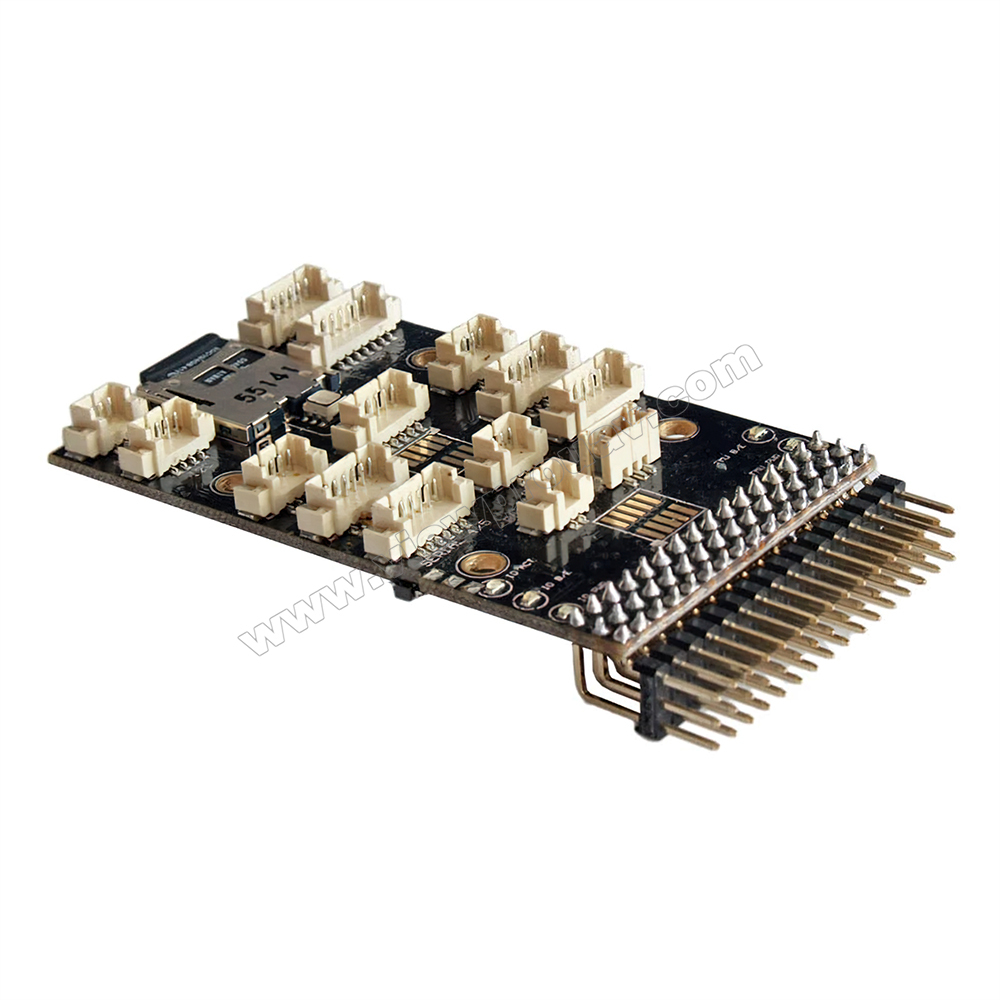
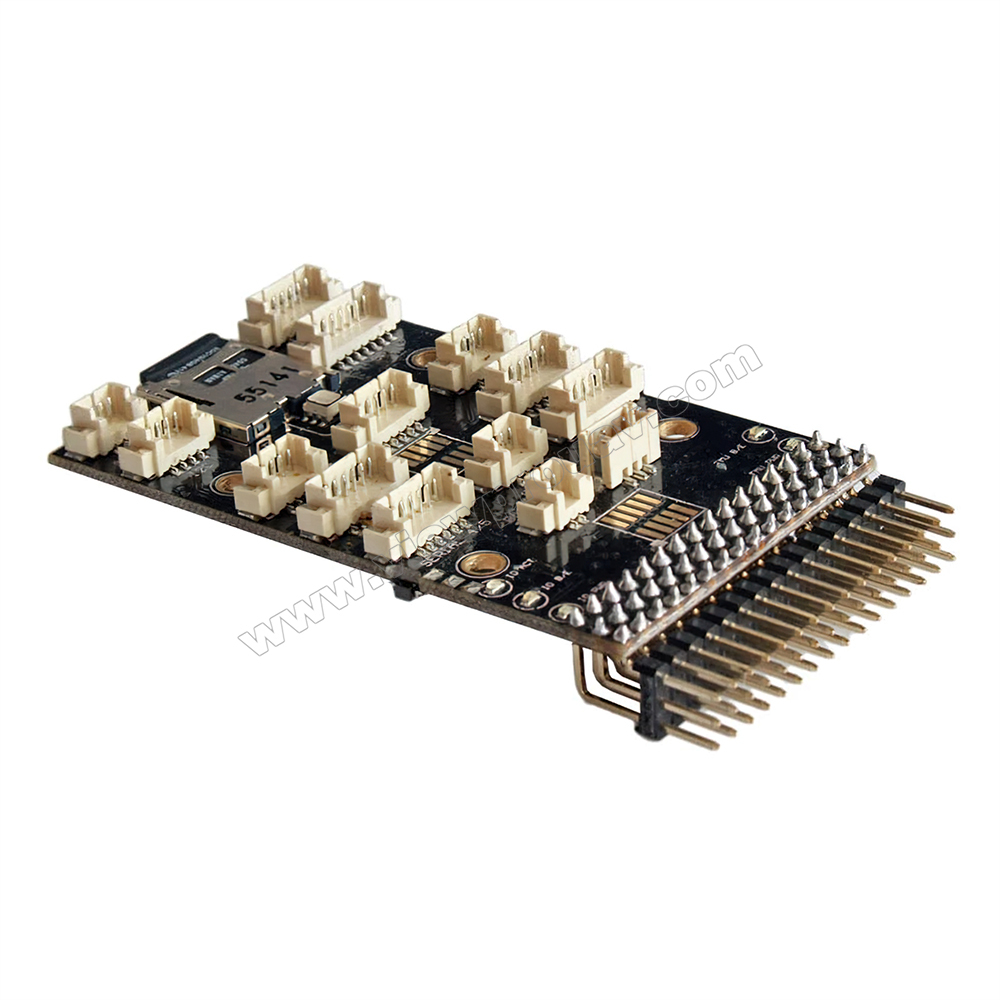
الواجهات:
- 5 منافذ UART (منافذ تسلسلية)، منفذ واحد عالي القدرة، ومنفذان مع التحكم في تدفق الأجهزة
- 2x علبة
- مدخل ومخرج S.BUS
- إشارة مجموع PPM
- مدخل RSSI (PWM أو الجهد)
- I2C
- SPI
- مدخلات ADC 3.3 و 6.6 فولت
- منفذ micro-USB خارجي
نظام الطاقة:
- وحدة تحكم مثالية للديود مع إمكانية التعافي التلقائي من الفشل
- سكة سيرفو عالية القدرة (7 فولت) وجاهزة لتيار عالي
- جميع المخارج الطرفية محمية من التيار الزائد، وجميع المداخل محمية من التفريغ الكهروستاتيكي
الوزن والأبعاد:
الوزن: 38 جرامًا (1.31 أونصة)
العرض: 50 مم (1.96 بوصة)
السمك: 15.5 مم (0.61 بوصة)
الطول: 81.5 ملم (3.21 بوصة)
مواصفات نظام تحديد المواقع العالمي (GPS)
دقة السرعة: 0.1 م/ث
أقصى ارتفاع: 50,000 متر
السرعة القصوى: 515 م/ث
أقصى تسارع: 4 جيجا
معدل التحديث: 10 هرتز
الوقت المستغرق للإصلاح الأول: بدء التشغيل البارد: 26 ثانية، بدء التشغيل الساخن: 1 ثانية
مصدر الطاقة: جهد تيار مستمر 5 فولت ± 5%
القطر: 54 مم / 2.126 بوصة
السمك: 15 مم / 0.59 بوصة
لمزيد من التفاصيل، يرجى زيارة PX4 2.4.8 Autopilot وحدة تحكم الطيران مفتوحة المصدر لمطوري الطائرات بدون طيار
-
مقدمة المنتج
-
مواصفة
تم إصدار PX4 2.4.8 حديثًا من قبل الشركة المصنعة لأجهزة التحكم في الطيران مفتوحة المصدر الشهيرة، وهو جيل جديد من أنظمة التحكم في الطيران. إنه يعتمد على معالج ARM عالي الأداء 32 بت، وجميع الأجهزة مفتوحة المصدر، والرقائق وأجهزة الاستشعار المستخدمة معلنة. يتم تصدير جميع الحافلات والأجهزة الطرفية، وهي ليست متوافقة مع الأجهزة الطرفية الأخرى فحسب، بل إنها أيضًا أكثر ملاءمة للمستخدمين الذين لديهم قدرات تطوير قوية. يحتوي التحكم في الطيران على معالجين مزدوجين مدمجين، أحدهما معالج قوي 32 بت stm32f427cortex، M4 core 168MHz/256KB RAM/2MB Flash؛ والآخر هو معالج مساعد للاستخدام الصناعي: 32 بت STM32F103، والذي يعمل بثبات ويضمن التشغيل الآمن.
مواصفات وحدة التحكم في الطيران مفتوحة المصدر PX4 2.4.8 Autopilot
المعالج الدقيق:
- نواة STM32F427 Cortex M4 ذات 32 بت مع وحدة النقطة العائمة
- 168 ميجا هرتز / 256 كيلوبايت ذاكرة وصول عشوائي / 2 ميجا بايت فلاش
- معالج مساعد STM32F103 آمن 32 بت
أجهزة الاستشعار:
- جيروسكوب L3GD20 ثلاثي المحاور 16 بت
- مقياس تسارع/مغناطيسية ثلاثي المحاور LSM303D بدقة 14 بت
- مقياس تسارع / جيروسكوب ثلاثي المحاور MPU 6000
- 5611 بارومتر
الواجهات:
- 5 منافذ UART (منافذ تسلسلية)، منفذ واحد عالي القدرة، ومنفذان مع التحكم في تدفق الأجهزة
- 2x علبة
- مدخل ومخرج S.BUS
- إشارة مجموع PPM
- مدخل RSSI (PWM أو الجهد)
- I2C
- SPI
- مدخلات ADC 3.3 و 6.6 فولت
- منفذ micro-USB خارجي
نظام الطاقة:
- وحدة تحكم مثالية للديود مع إمكانية التعافي التلقائي من الفشل
- سكة سيرفو عالية القدرة (7 فولت) وجاهزة لتيار عالي
- جميع المخارج الطرفية محمية من التيار الزائد، وجميع المداخل محمية من التفريغ الكهروستاتيكي
الوزن والأبعاد:
الوزن: 38 جرامًا (1.31 أونصة)
العرض: 50 مم (1.96 بوصة)
السمك: 15.5 مم (0.61 بوصة)
الطول: 81.5 ملم (3.21 بوصة)
مواصفات نظام تحديد المواقع العالمي (GPS)
دقة السرعة: 0.1 م/ث
أقصى ارتفاع: 50,000 متر
السرعة القصوى: 515 م/ث
أقصى تسارع: 4 جيجا
معدل التحديث: 10 هرتز
الوقت المستغرق للإصلاح الأول: بدء التشغيل البارد: 26 ثانية، بدء التشغيل الساخن: 1 ثانية
مصدر الطاقة: جهد تيار مستمر 5 فولت ± 5%
القطر: 54 مم / 2.126 بوصة
السمك: 15 مم / 0.59 بوصة
لمزيد من التفاصيل، يرجى زيارة PX4 2.4.8 Autopilot وحدة تحكم الطيران مفتوحة المصدر لمطوري الطائرات بدون طيار