

Centro de soporte
Centro de soporte
Preguntas frecuentes
Caso 1: La fuente de alimentación del cardán no es suficiente
Respuesta: Asegúrese de que la fuente de alimentación sea de 3S~6S (12V~24V), asegúrese de que el cable de alimentación pueda soportar una corriente eléctrica de 2A.
Caso 2: Problema de alimentación interna del cardán
Respuesta: El cable de alimentación interno del cardán está presionado.
Respuesta:
(1) La PC necesita instalar el controlador del puerto serie. Después de conectar el extremo USB a la PC, verifique el “Administrador de dispositivos”-”Puerto”-”USB-SERIAL CH340 (COM x)” para confirmar el puerto COM correcto.
(2) Si no hay un ícono de “USB-SERIAL”, por favor instale el controlador TTL del puerto serie.
(3) Después de instalar el controlador, conecte los cables TX y RX juntos, use el asistente del puerto serie para enviar datos y verificar si el entorno del puerto serie es normal o no. Si puede recibir lo que acaba de enviar a sí mismo, significa que el cable es normal.
Caso 1: Utilice el cable USB a TTL proporcionado, puede controlar el gimbal, pero no hay retroalimentación
Respuesta: Vuelva a conectar ambos extremos del cable y pruebe nuevamente. Si aún no hay retroalimentación, pruebe el TX-RX del cable en sí (Re. 2.1 ¿Cómo probar el cable USB a TTL proporcionado?). Verifique si los datos enviados y recibidos son consistentes o no para confirmar si el cable está bien o no. Si el cable es normal, reinicie el gimbal y pruebe nuevamente. Si sigue siendo anormal, puede que el cableado esté en circuito abierto dentro del gimbal. Para el gimbal de versión estándar, vuelva a conectar el cable de 15 pines en la caja de control. Para la versión Viewport, vuelva a conectar el terminal de cableado del puerto serie y vuelva a conectar el Viewport.
Caso 2: Versión estándar: El tapón de puente amarillo en la placa CONN está desconectado, no se puede controlar el gimbal (inclinación y guiñada), pero el control de la cámara (zoom y grabación) es normal.
A: Necesita hacer un cortocircuito en la posición del tapón de puente.
Caso 3: Versión estándar: El gimbal está en modo S.Bus, mientras tanto el puerto serie no puede comunicarse.
Respuesta: Siga las instrucciones relacionadas para recuperar el control del puerto serie.
Caso 4: El gimbal no puede comunicarse a través de TCP/TTL.
Respuesta: Pruebe el gimbal mediante control PWM. Si la cámara no se puede controlar y la luz del programa en la placa CONN no parpadea, probablemente el hardware de CONN esté dañado, devuélvalo a la fábrica para su reparación.
Caso 5: Versión estándar: Puede controlar el gimbal pero no la cámara
Respuesta: 1) Verifique si el software del gimbal es compatible o no, por ejemplo, las cámaras (Z40K, Z-Fusion pro, Q30XIR) tienen 2 tasas de baudios, necesita prestar atención a este punto.
2) Verifique si la comunicación desde la RX de la cámara al TX de la placa CONN está bien o no. Si no está bien, necesita reparación.
3) Si la comunicación desde la RX de la cámara al TX de CONN está bien, cambie una placa CONN del mismo modelo (si está disponible) para probar, o retire el diodo D20 en la placa CONN y pruebe nuevamente.
4) Si aún no funciona después de todas las operaciones anteriores, probablemente el módulo de la cámara esté roto.
Caso 1: El eje de rodillo del cardán golpea el motor de guiñada y gira aleatoriamente o no responde después de encender, o gira aleatoriamente en los 3 ejes.
Respuesta:
(1) Conéctese al puerto serie, asegúrese de que esté bien conectado
(2) Al encender la cámara, envíe continuamente el comando “3E 1B 00 1B 00 00″ para apagar los motores, siga haciendo clic (o establezca un intervalo de envío de 500 ms) hasta que el motor deje de moverse.
(3) Envíe el comando “3E 45 01 46 0B 0B 3E 1B 00 1B 00 00″ y espere a que se complete la calibración automática del cardán
(4) Después de la calibración, ajuste la posición horizontal de la lente de la cámara para alinearla con la flecha de instalación (puede moverla manualmente a la posición deseada y esperar 2S), envíe el comando “3E 1A 00 1A 00 00″ para guardar esta posición (también es la posición de inicio y la posición después de la autocomprobación al encender)
Caso 2: Después de encender, el cardán gira aleatoriamente.
Respuesta:
(1) La antena del transmisor de imagen y datos en el dron interfiere con el codificador magnético del cardán. Apague el transmisor para eliminar la interferencia y luego juzgue en consecuencia. Si el fenómeno desaparece, ajuste la posición (preferiblemente a más de 35 cm de distancia) o la dirección (no mirando hacia la dirección del cardán) de la antena.
(2) Elimine la interferencia de la fuente de alimentación inestable suministrando energía al cardán de forma independiente, o ajustando el voltaje (pruebe tanto con alimentación de 3S como de 6S).
(3) Actualice el programa de la placa CONN/software de versión DJI/software de control de viewport para resolver el problema de que el puerto serie se ve interferido al iniciar y envía comandos incorrectos. (Solución solo para nuevos cardanes que giran aleatoriamente y repiten el mismo problema incluso temporalmente funcionan normales después de enviar el comando para calibrar.)
(4) Si se han probado todos los métodos anteriores y el cardán aún gira después de encender el dron, indica que el cardán está sujeto a interferencia electromagnética, y los datos internos tienen errores, necesita enviarlo de vuelta a la fábrica para un procesamiento anti-interferencia.
(5) Caso especial: el cardán gira después de trabajar un tiempo con CAN, los motores están muy calientes,
Caso 3: Después de encender, el cardán está normal. Después de un tiempo, se sacude irregularmente o está inmóvil y tiene un sonido de chirrido
A: Causado por error IIC (el chip de control de la placa principal está roto).
Caso 4: Apague el enlace de imagen y datos y enciéndalo de nuevo, el motor del cardán gira anormalmente y tiene un sonido de chirrido
Respuesta: ¿Alguna vez ha desensamblado o ensamblado la placa de amortiguación? Esta operación puede causar este problema
Caso 5: Los motores del cardán no se mueven pero tienen un sonido de chirrido después de encender.
Respuesta: Envíe: 3E 3d 00 3d 00 00 para consultar la retroalimentación del ángulo del cardán, si todos los valores de IMU son 0, significa que el IMU del cardán es anormal. Verifique si la salida de 5V de la caja de control del cardán es normal o no. Si es normal, verifique si el cableado interno del IMU es normal o no, o si el conector está suelto o no. Si el cardán es solo versión IP, verifique si el anillo deslizante está bien.
Respuesta: Retroalimentación manual: valor de ángulo de cada eje, veces de zoom de la cámara y datos poco utilizados (desplazamiento de seguimiento, distancia del telémetro, posición del objetivo)
Retroalimentación automática: valor de ángulo de cada eje y velocidad angular (configurar el modo de retroalimentación, activar la retroalimentación automática)
La estructura de retroalimentación automática predeterminada del sistema: (no se ha establecido el modo de retroalimentación)
typedef struct {
uint16_t marca de tiempo
int16_t rollIMUangle
int16_t ángulo de inclinaciónIMU
int16_t ángulo de inclinación IMU
int16_t rollTAGangle
int16_t pitchTAGangle
int16_t yawTAGangle
int16_t velocidad de la etiqueta de rollo
int16_t tacto de velocidad
int16_t velocidad de guiñada
int16_t rollStatorRotorAngle
int16_t pitchEstatorRotorAngle
int16_t yawStatorRotorAngle
} T_SbgcGimbalRealtimeDataCustomReq_full
Respuesta:
follow_yaw_disable (modo no seguir el paneo del dron): 3E 1F 06 25 01 1F 00 00 00 00 20
follow_yaw_enable (modo seguir el paneo del dron): 3E 1F 06 25 01 1F 01 00 00 00 21
query_follow_state (consultar modo actual): 3E 40 02 42 01 1F 20
guardar configuraciones del cardán (guardar, el modo del próximo inicio es el mismo que el modo guardado): 3E 20 00 20 00 00
Obtenido de la consulta al iniciar: 3E 1F 06 25 01 1F FF FF FF FF 1C (Para una consulta precisa, por favor envíe primero el comando de modo)
Caso 1: El seguimiento del cardán, después de exceder el ángulo límite hacia arriba, el cardán se moverá hacia abajo. Esto es normal.
Caso 2: El cardán (envío antiguo) en modo de velocidad, no se puede controlar después de pasar el límite del eje YAW.
Caso 3: Si el cardán (envío antiguo) está montado al revés y se inclina hacia abajo hasta el límite, hará que el lente apunte hacia arriba.
1) ¿Cómo entra el gimbal en el modo de escaneo?
Respuesta: Agregar script a la calibración del gimbal y ejecutar el script
Entrar en modo de escaneo: 3E 45 01 46 1B 1B
Salir del modo de escaneo: 3E 45 01 46 1A 1A
2) El gimbal recibe la retroalimentación de parada
Respuesta: enviar comando “AA 55 20 10 FF”, luego encender para habilitar.
Enviar: FF 01 0F 10 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
Recibir: 3E 43 01 44 43 43
3) El gimbal se pasa del objetivo en modo de seguimiento.
Respuesta: Enviar comando: AA 55 28 50 FF AA 55 2B 50 FF
Caso 1: Modificar el rango de control del ángulo de inclinación/giro mediante control RC
Respuesta:
(1) Enviar comando: 3E 15 00 15 00 00
(2) Obtener el valor de retroalimentación
(3) Después de cambiar el bit correspondiente, envíe el comando cambiado al cardán (CS: Suma de 5elbyte a último byte módulo 256)
Por ejemplo: enviar: 3E 15 00 15 00 00
Feedback:3E 15 86 9B 00 64 0A 46 50 01 0E 64 0A 46 5A 00 0E 64 0A 46 6E 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 1E 00 30 FD D0 02 01 03 1E 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 00 00 00 00 00 00 32 32 00 00 00 03 02 03 01 00 02 00 01 02 00 00 00 26 11 18 19 1B 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 53 07 50 04 00 00 00 01 00 0B
Análisis de los comentarios:
[
Encabezado del marco: 3E 15 86 9B
Cuerpo de datos:
``` 00 64 0A 46 50 01 0E 64 0A 46 5A 00 0E 64 0A 46 6E 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 1E 00 30 FD D0 02 01 03 1E 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 00 00 00 00 00 00 32 32 00 00 00 03 02 03 01 00 02 00 01 02 00 00 00 26 11 18 19 1B 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 53 07 50 04 00 00 00 01 00 ```
Checksum:0B (Suma de cada byte del cuerpo de datos módulo 256)
]
En el cuerpo de datos
(D3 FF 5A 00–>0xFFD3=-45 Inclinación hacia arriba 45° 0x005A=90° inclinación hacia abajo 90°, Arriba negativo abajo positivo)
(30 FD D0 02–>0xFD30=-720 Yaw izquierda 720° 0x02D0=derecha720° Yaw derecha 720°, izquierda negativa derecha positiva)
Escriba el valor modificado:
3E 16 86 9C 00 64 0A 46 50 01 0E 64 0A 46 5A 00 0E 64 0A 46 6E 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 xx xx xx xx 01 03 1E 00 xx xx xx xx 01 03 1E 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 00 00 00 00 00 00 32 32 00 00 00 03 02 03 01 00 02 00 01 02 00 00 00 26 11 18 19 1B 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 53 07 50 04 00 00 00 01 00 CS
Caso 2:Configuración del valor del ángulo del codificador de guiñada
Respuesta:
Enviar: 3E 3E 00 3E 00
``` Comentarios:3E 3E 97 D5 00 00 01 9A 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 64 64 64 5F 5F 5F 14 00 00 00 00 00 00 DE FE 00 00 00 00 22 01 87 00 78 3C 00 00 00 00 00 00 58 02 88 13 32 00 00 00 00 00 00 32 32 32 14 14 14 3C 3C 3C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 02 00 00 00 00 00 00 00 00 E1 ```
Analizar:
00 00: rollo
00 00: tono
DE FE: guiñada 0xFEDE–>-290
22 01:yaw 0×0122–> 290
Escriba el valor modificado:
Enviar: 3E 3F 97 D6 00 00 01 9A 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 64 64 64 5F 5F 5F 14 00 00 00 00 00 00 DE FE 00 00 00 00 22 01 87 00 78 3C 00 00 00 00 00 00 58 02 88 13 32 00 00 00 00 00 00 32 32 32 14 14 14 3C 3C 3C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 02 00 00 00 00 00 00 00 00 E1
Caso3:El giro del cardán no sigue o sigue siendo demasiado sensible.
Respuesta:
(1) Utilice el canal de Modo del control remoto para cambiar rápidamente 4 veces seguidas (interruptor de tres marchas: marcha media –> marcha alta –> marcha media –> marcha alta –> marcha media –> marcha alta –> marcha media –> marcha alta) para ver si sigue o no.
(2) Utilice el software de control Viewlink, control por puerto serie, active "Habilitar seguimiento" para ver si sigue o no.
(3) Utilice el comando para consultar los parámetros, después de obtener los parámetros de retroalimentación, modifique los parámetros correspondientes. Guarde la configuración enviando: 3E 20 00 20 00.
Enviar: 3E 15 00 15 00 00
Feedback:3E 15 86 9B 00 64 0A 46 82 01 0E 64 0A 46 64 00 0E 64 0A 46 A0 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 13 00 D4 FE 2C 01 01 03 13 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 03 00 00 00 00 00 32 32 00 00 00 FD FF 03 01 00 02 00 01 02 00 00 17 12 11 18 19 00 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 51 07 10 44 00 00 00 01 00 43
32 : banda muerta (aumenta este valor para reducir la sensibilidad de seguimiento)
32: curva exponencial
1E 1E 3C: Seguir VELOCIDAD
03 03 03: Seguir LPF
Enviar:
``` 3E 16 86 9C 00 64 0A 46 82 01 0E 64 0A 46 64 00 0E 64 0A 46 A0 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 13 00 D4 FE 2C 01 01 03 13 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 03 00 00 00 00 00 64 3C 00 00 00 FD FF 03 01 00 02 00 01 02 00 00 17 12 11 18 19 00 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 51 07 10 44 00 00 00 01 00 CS ```
Enviar: 3E 3E 00 3E 00 00
Feedback: 3E 3E 97 D5 00 00 01 9A 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 64 64 64 5F 5F 5F 14 00 00 00 00 00 00 DE FE 00 00 00 00 22 01 87 00 78 3C 00 00 00 00 00 00 58 02 88 13 32 00 00 00 00 00 00 32 32 32 14 14 14 3C 3C 3C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 02 00 00 00 00 00 00 00 00 E1
3C 3C 3C: Siga el RANGO
Por ejemplo, envíe el comando de modificación: 3E 3F 97 D6 00 00 01 9A 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 64 64 64 5F 5F 5F 14 00 00 00 00 00 00 DE FE 00 00 00 00 22 01 87 00 78 3C 00 00 00 00 00 00 58 02 88 13 32 00 00 00 00 00 00 32 32 32 14 14 14 01 01 3C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 02 00 00 00 00 00 00 00 00 CS
Caso4P:¿Cómo ajustar el ángulo de cabeceo inicial del cardán?
Respuesta:
(1) Enviar: 3E 15 00 15 00 00 00
(2) Recibir:3E 15 86 9B 00 64 0A 46 A0 01 0E 64 0A 46 8C 00 0E 64 0A 46 B4 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 0B 00 D4 FE 2C 01 01 03 0B 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 03 00 00 00 00 00 32 32 00 00 00 01 03 FD FF 00 02 00 01 02 00 00 17 12 11 18 19 00 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 1E 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 51 07 10 44 00 00 00 01 00 6F
00 00: el ángulo de cabeceo inicial es 0°.
(3) Si quieres establecer un ángulo de 45°, 0×0800–> 2048 –>2048×0.02197265625=45
Enviar:3E 16 86 9C 00 64 0A 46 A0 01 0E 64 0A 46 8C 00 0E 64 0A 46 B4 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 0B 00 D4 FE 2C 01 01 03 0B 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 03 00 00 00 00 00 32 32 00 00 00 01 03 FD FF 00 02 00 01 02 00 00 17 12 11 18 19 00 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 1E 00 00 00 00 08 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 51 07 10 44 00 00 00 01 00 77
(4) Enviar: 3E 20 00 20 00 para guardar la configuración.
Caso5P:¿Cómo cambiar el modo de velocidad PWM/modo de ángulo del gimbal?
Respuesta:
(1) Primer envío: 3E 15 00 15 00 00
(2) Obtener el valor de retorno
(3) Después de cambiar el bit correspondiente, envíe la instrucción modificada al cardán (suma de verificación: suma de todos los bits desde 6elbyte hasta el último byte módulo 256)
Por ejemplo: enviar: 3E 15 00 15 00 00
Recibir:3E 15 86 9B 00 64 0A 46 50 01 0E 64 0A 46 5A 00 0E 64 0A 46 6E 00 0E 64 00 00 D3 FF 2D 00 01 03 14 00 D3 FF 5A 00 01 03 1E 00 30 FD D0 02 01 03 1E 01 3C 00 01 00 00 00 00 37 0A 00 00 02 04 00 00 00 00 00 00 32 32 00 00 00 03 02 03 01 00 02 00 01 02 00 00 00 26 11 18 19 1B 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 53 07 50 04 00 00 00 01 00 0B
Análisis de las instrucciones recibidas:
01: modo de velocidad –>cambiado a 02: modo de ángulo
37: RC_DEADBAND –>cambiado a 00
0A: RC_EXPO_RATE –>cambiado a 00
Escriba el valor modificado:
Enviar:3E 16 86 9C 00 64 0A 46 50 01 0E 64 0A 46 5A 00 0E 64 0A 46 6E 00 0E 64 00 00 D3 FF 2D 00 02 03 14 00 D3 FF 5A 00 02 03 1E 00 30 FD D0 02 02 03 1E 01 3C 00 01 00 00 00 00 00 00 00 00 02 04 00 00 00 00 00 00 32 32 00 00 00 03 02 03 01 00 02 00 01 02 00 00 00 26 11 18 19 1B 00 07 04 03 C8 FB 22 FC 14 FB 8B 28 14 00 00 00 1E 1E 3C 00 00 00 00 00 00 00 00 00 00 00 05 07 0F 32 06 03 03 03 53 07 50 04 00 00 00 01 00 CD
Caso6P:Cómo modificar el valor de potencia de ¿Motor cardán?
Respuesta:
``` (1) Obtener los parámetros PID del giro, inclinación y guiñada del cardán ```
Enviar: 3E 40 04 44 03 09 0A 0B 21
Ejemplo de retroalimentación: (POWER_ROLL=75, POWER_PITCH=75, POWER_YAW=115)
3E 1F 10 2F 03 09 4b 00 00 00 0a 4b 00 00 00 0b 73 00 00 00 2a
Encabezado del marco: 3E 1F 10 2F
Data body:03 09 4b 00 00 00 0a 4b 00 00 00 0b 73 00 00 00
Suma de verificación: 2a
|
Nombre del parámetro
|
IDENTIFICACIÓN
|
TIPO
|
MIN
|
MÁXIMO
|
|
PODER_ROLL |
9 |
de |
0 |
255 |
|
POTENCIA_PITCH |
10 |
|||
|
GUIÑADA DE POTENCIA |
11 |
(2) Establecer el valor del motor de balanceo, cabeceo y guiñada
(POWER_ROLL=75, POWER_PITCH=100, POWER_YAW=115)
Tal como enviar: 3E 1f 10 2F 03 09 4b 00 00 00 0a 64 00 00 00 0b 73 00 00 00 43 (El último bit es la suma de los bits rojos módulo 256)
(3)Guarde la configuración del paso anterior.
enviar: 3E 20 00 20 00
Caso 7P:¿Cómo modificar los parámetros PID del motor del cardán?
Respuesta:
(1) Obtén los parámetros PID de rollo, cabeceo y guiñada del cardán
Enviar: 3E 40 0A 4A 09 00 01 02 06 07 08 2A 2B 2C A2
Ejemplo de retroalimentación:
3E 1F 2E 4D
09
0064 00 00 00———-ROTAR P= 100
0164 00 00 00———-PUNTO P=100
0278 00 00 00———YAW P=120
06 46 00 00 00 ———R D= 70
07 46 00 00 00———P D=70
08 64 00 00 00———Y D=70
2A 5F 00 00 00———R G=2
2B 5F 00 00 00———P G=2
2C 5F 00 00 00———Y G=2
SI—- suma de verificación = byte menos significativo de todos los bytes azules
GAIN = 0.1 + X * 0.02 X=50*gain -5 2 = 0.1 + 95* 0.02
(2) Escriba el comando de modificación
Tal como enviar: 3E 1F 2E 4D 09 00 64 00 00 00 01 64 00 00 00 02 78 00 00 00 06 46 00 00 00 07 46 00 00 00 08 64 00 00 00 2A 5F 00 00 00 2B 5F 00 00 00 2C 5F 00 00 00 EF
(3) Guarde la configuración del paso 2
Enviar: 3E 20 00 20 00
Caso 8: P:¿Cómo consultar y modificar el valor del codificador?
Respuesta:
(1) Enviar: 3E 21 00 21 00 00 para obtener valor
(2) Escribir valor modificado
(3) Enviar: 3E 20 00 20 00 para guardar la configuración.
Ejemplo:
Enviar: 3E 21 00 21 00 00
Recibir: 3E 21 68 89 00 23 23 37 1E 14 14 00 0C 3B 00 04 05 00 1D 1F 00 02 05 00 00 00 00 00 00 00 00 00 B6 C8 B0 20 34 FD 54 02 71 F9 1A 03 00 C8 C8 00 00 00 00 00 00 00 00 32 00 00 00 00 01 00 01 00 01 00 00 00 00 00 00 14 14 14 00 FB F6 64 FE 14 28 0D 04 0E 04 E4 03 0B 08 0D 07 07 00 32 32 32 00 00 00 03 01 32 00 14 00 14 14 14 96
54 02: 0×0254 Valor del codificador de rodillo
71 F9: 0xF971 Valor del codificador de médula
1A 03: 0x031A Valor del codificador de guiñada
B6 C8: 0xC8B6 Posición de inicio del rodillo
B0 20: 0x20B0 Posición de inicio del lanzamiento
34 FD: 0xFD34 Posición inicial de guiñada
Escribe el comando correspondiente:
Enviar: 3E 22 68 8A 00 23 23 37 1E 14 14 00 0C 3B 00 04 05 00 1D 1F 00 02 05 00 00 00 00 00 00 00 00 00 B6 C8 B0 20 34 FD 54 02 71 F9 21 03 00 C8 C8 00 00 00 00 00 00 00 00 32 00 00 00 00 01 00 01 00 01 00 00 00 00 00 00 14 14 14 00 FB F6 64 FE 14 28 0D 04 0E 04 E4 03 0B 08 0D 07 07 00 32 32 32 00 00 00 03 01 32 00 14 00 14 14 14 9D
Respuesta:
(1) Verifique la estabilidad del cardán cuando esté apagado, asegúrese del equilibrio de cada eje.
(2) Verifique el método de montaje, el tipo de bolas de amortiguación, si son demasiado pocas o demasiadas, si están envejecidas y si la placa de amortiguación ha sido modificada.
(3) Verifique si el cableado externo del cardán está tirante hacia el cardán.
(4) Modifique los parámetros PID del cardán.
Caso 1: Algunos encabezados de marco “AA…” / ”55 AA…” / “7E 7E…” que no están en el archivo de protocolo de cardán se envían, lo que causa un error de análisis y el cardán no responde.
Respuesta: Cambiar el encabezado del marco de protocolo no de cardán, no podría ser similar.
Caso 2: Algunos datos inválidos se envían a través del puerto serie al cardán, causando que el puerto serie del cardán no responda.
Respuesta: Modificar el software: Reducir el voltaje del puerto serie al encender, o retrasar el inicio del puerto serie.
Ies una alarma de temperatura, que se puede eliminar
Caso 1: Utiliza el software Viewlink, PWM, control S.BUS
Respuesta:
(1) Conectar el puerto serie, asegurarse de que esté bien conectado.
(2) Envíe los comandos “AA 55 0A 96 FF” y “AA 55 0B 43 FF”, y los comandos de retroalimentación recibidos son los mismos que los enviados.
Caso 2: Utilizar el control de protocolo
Respuesta: comando de cambio de imagen en imagen/cambio de paleta de colores, que necesita establecer el valor de alarma de temperatura; el 9el al 12º byte en el comando 7E son los bytes de configuración de la alarma de medición de temperatura, un número de punto flotante de precisión simple de 32 bits (4 bytes, big-endian) se convierte en un valor de temperatura decimal, el valor predeterminado de fábrica es 300° (float: 43 96 00 00)
Por ejemplo:
Térmica EO+IR (color pseudo Fusion):
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 01 00 00 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 94 ```
Térmica infrarroja (pseudocolor de fusión):
7E 7E 44 00 00 78 00 00 00 00 96 43 01 00 01 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 95
Térmica IR (pseudocolor Fusion) + EO:
7E 7E 44 00 00 78 00 00 00 00 96 43 01 00 02 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 96
Solo EO:
7E 7E 44 00 00 78 00 00 00 00 96 43 01 00 03 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 97
Térmica EO+IR (blanco caliente):
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 00 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 93 ```
Térmica infrarroja únicamente (blanco caliente):
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 01 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 94 ```
Térmico infrarrojo (blanco caliente) + EO:
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 02 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 95 ```
Solo EO:
7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 03 00 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 96
Térmica EO+IR (negra caliente):
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 00 01 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 94 ```
Solo infrarrojo térmico (negro caliente):
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 01 01 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 95 ```
Térmico infrarrojo (negro caliente) + EO:
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 02 01 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 96 ```
Solo EO:
``` 7E 7E 44 00 00 78 00 00 00 00 96 43 00 00 03 01 00 01 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 97 ```
Caso 1: El cardán está montado normalmente (colgando), la imagen EO es normal, pero la imagen térmica está invertida
Respuesta: Conecte el puerto serie y asegúrese de que la comunicación sea normal. Envíe el comando de imagen térmica en posición vertical: “7e 7e 44 00 00 91 80 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 51″, la imagen térmica será normal.
Expandir:
Imagen térmica al revés: “7e 7e 44 00 00 91 c0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 91″
Cámara EO: (Rotación de imagen hacia adelante: 81 01 04 66 03, Imagen inversa: 81 01 04 66 02 FF, Guardar configuración inversa: 81 01 04 3F 01 7F FF)
Caso 1: Necesita seleccionar una imagen específica como la pantalla de inicio
Respuesta: Enviar el comando serial “Tipo+Guardar”
EO + IR (caliente blanco): “7e 7e 44 00 00 78 00 00 00 00 96 43 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 91″
EO + IR (caliente negro): “7e 7e 44 00 00 78 00 00 00 00 96 43 00 00 00 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 92″
IR (caliente blanco): “7e 7e 44 00 00 78 00 00 00 00 96 43 00 00 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 92″
IR solo (caliente blanco) + EO: “7e 7e 44 00 00 78 00 00 00 00 96 43 00 00 02 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 95″
EO solo: “7e 7e 44 00 00 78 00 00 00 00 96 43 00 00 03 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 96″
Guardar: “7e 7e 44 00 00 8e 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ce”
Caso 1: Conectar el puerto serie, enviar comando del puerto serie
Respuesta: Enviar comando serie “7e 7e 44 00 00 d4 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 14”. Si hay salida de video, la información de la versión del software aparecerá en la esquina inferior izquierda de la pantalla en 2 líneas. (como se muestra a continuación)
Caso 2: Conectar TCP, enviar comando TCP
Respuesta: Enviar comando TCP ”EB 90 30 7E 7E 44 00 00 D4 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 14 28”. Si hay salida de video, la información de la versión del software aparecerá en la esquina inferior izquierda de la pantalla en 2 líneas. (como se muestra a continuación)
Caso 3: Después de encender, activar inmediatamente el flujo de video (HDMI o IP) y esperar a que la información de la versión se muestre automáticamente, la cual desaparecerá en 30 segundos.
Caso 4: Si no hay salida de flujo de video o es anormal, conectar la salida IP mediante la herramienta de configuración (descargar desde el sitio web de Viewpro) y hacer clic en Buscar versión en la parte inferior y el número de versión se mostrará en el cuadro.
Caso 1: La energía se corta sin detener la grabación, causando que el archivo de video almacenado se dañe
Respuesta:
1. Formato H264, el video se puede reproducir sin detener la grabación cuando se interrumpe la energía
2. Configurado por protocolo para empaquetar los videos por segmentos.
3. Recuperar archivos de video mediante software de reparación
Respuesta: Utilice el comando de tamaño de pista para establecer el tamaño deseado. Enviado una vez, este tamaño se almacenará en eeprom: AA 55 1E SZ FF, tenga en cuenta que SZ es hexadecimal
0×24: Plantilla pequeña 32
0×28: Plantilla mediana 64
0×30: Plantilla grande 128
La información anterior se puede superponer, por ejemplo:
0x2c: plantilla pequeña + plantilla mediana
0×38: Plantilla mediana + plantilla grande
Ejemplo: Puede enviar AA 55 1E 28 FF para establecer el tamaño de la pista en una plantilla mediana.
Respuesta:
Enviar comando: AA 55 20 02 FF —— salida offset
AA 55 20 00 FF —— no salida offset
Formato de salida: BB 01 XL XH YLYH 02 CS (CS: suma de todos los bytes módulo 256)
Por ejemplo: BB 01 2A 01 80 FE 42 A7
Offset del eje X 0x012A–> 298 Offset del eje Y 0xFE80–> -384 (en relación con el punto central de desviación en píxeles: derecha positivo, izquierda negativo, abajo positivo, arriba negativo)
Al enviar el comando de detener el seguimiento, se devolverá: BB 01 00 00 00 00 20 DC

Protocolo Viewlink: el punto central es 0, la coordenada central del offset (0,0)
Restar (960, 540) de las coordenadas en píxeles de los objetivos bloqueados
| 1 | Encabezado de marco | 0xBB | |
| 2 | Dirección | 0×01 | |
| 3 | Offset del eje X | LSB | |
| 4 | FSB | ||
| 5 | Offset del eje Y | LSB | |
| 6 | FSB | ||
| 7 | Estado | BYTE0 0: No mostrar cuadro de seguimiento1: Mostrar cuadro de seguimientoBYTE1 0: Sin objetivo
1: Objetivo de seguimiento BYTE2 0: EO 1: IR BYTE3 0: Visualización de imagen única 1: Visualización PIP BYTE4 0: Dentro de la temperatura preestablecida 1: exceder la temperatura preestablecida BYTE56 Estado de cambio de seguimiento secundario en círculo, 3 estados en total: 1, 2, 3 BYTE 7 Reservado |
|
| 8 | Suma de verificación |
Señalando puntos de seguimiento (960, 540):
(1) 7E 7E 44 00 00 86 00 C0 03 1C 02 00 01 3C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 E4
(2) 55 AA DC 0D 31 00 00 00 00 00 0A 00 00 00 00 36
Respuesta: Por ejemplo, alarma roja caliente
7E 7E 44 00 00 78 00 00 00 00 00 30 00 00 01 82 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 6B
Respuesta:
Modifique la configuración IP de la salida Ethernet versión gimbal:
IP:192.168.0.2 7e 7e 44 00 00 87 c0 a8 00 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 31
IP:192.168.0.3 7e 7e 44 00 00 87 c0 a8 00 03 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 32
IP:192.168.1.160 7e 7e 44 00 00 87 c0 a8 01 A0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 D0
Respuesta:
1.Formatee una tarjeta TF
2.Cree un archivo en la tarjeta TF y nómbralo como “update”, y coloque el software “S303M32.bin” en este archivo.
3.Inserte la tarjeta TF en la cámara
4.Encienda la cámara
5.Espera de 2 a 3 minutos (La pantalla indicará el éxito si hay salida de video. El gimbal emitirá un sonido de indicación de posición inicial después de que se complete la actualización.)
6.Reinicie la cámara

Caso 1: La conexión Ethernet del ordenador muestra error de conexión de red

Respuesta: La interfaz Ethernet del cardán no está conectada o la conexión no es buena, reconéctala. Si sigue anormal, usa un multímetro para medir la resistencia de 4 cables Ethernet del cardán. Mide la resistencia de cualquier par de 2 cables, entre 3-4Ω es normal, si no, el cardán tiene una falla.
Caso 2: La dirección IP del cardán puede hacer ping bien, y el control TCP de Viewlink se puede conectar
Respuesta:
A. Reconfigura los ajustes de codificación con la Herramienta de Configuración de Cámara (descargar desde el sitio web de Viewpro) de acuerdo con los ajustes de fábrica, y reinicia el cardán. DHCP debe estar desactivado al salir video por RTSP.
B. Viewlink puede controlar el cardán a través de TCP, pero no puede salir stream de video. Y el stream de video funciona bien en otro software de reproducción, entonces desactiva todos los firewalls de tu ordenador.
Caso 3: La conexión Ethernet del ordenador muestra que la conexión de red es normal, pero la dirección IP del cardán no puede hacer ping normalmente (Si alguna vez cambiaste la IP)
Respuesta: Usa un cable USB a TTL, conecta el ordenador al puerto serie del cardán, abre Viewlink -> “configuración” -> “comandos extendidos”, y envía: “7E 7E 44 00 00 87 C0 A8 02 77 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 A8 “, restaura la IP predeterminada de fábrica (rtsp://192.168.2.119/554), reinicia el cardán y conéctate de nuevo.
Caso 4: La dirección IP del cardán no puede hacer ping (y el procesamiento del Caso 2 B no puede ayudar, porque los parámetros de codificación son incorrectos)
Respuesta: Usa la tarjeta TF para actualizar el firmware de IP para recuperar la IP y los ajustes de codificación. Reinicia después de la actualización.
Caso 1: Tanto el puerto serie (TTL) como el control TCP no se pueden conectar, el flujo de video es normal (versión de Viewport)
Respuesta: Presione el botón de Reinicio en la caja de control de Viewport y mantenga presionado hasta que la actualización finalice. Encienda el gimbal. Actualización en Viewlink: “Configuraciones” -> “actualización de firmware” -> “archivo de actualización” -> “iniciar”, vuelva a grabar el programa, reinicie el gimbal e intente el control nuevamente.
Caso 2: El puerto serie es normal, pero TCP no se puede conectar, el flujo de video es normal
Respuesta:
(1) La computadora ha activado VPN o cortafuegos. Por favor, desactive VPN y cortafuegos.
(2) El TX del puerto serie de la cámara está roto. Verifique si hay cambios en el zoom OSD o si el seguimiento funciona o no mediante el control del puerto serie. Si OSD no cambia al hacer zoom o no se puede iniciar el seguimiento, significa que el TX de la cámara está roto.
(3) Algunos gimbals no soportan control TCP. Por favor, consulte la especificación del producto o el manual para más detalles.
Caso 1: Utilice el cable USB a TTL de Viewpro, el software puede controlar el cardán, pero el tiempo de espera de la actualización
Respuesta: El cable USB a TTL puede no estar bien conectado, reconecte ambos extremos.
Caso 2: La actualización se interrumpe durante el proceso de actualización, y el puerto serie ya no se puede conectar.
Respuesta: Utilice el método antiguo para actualizar mediante SecureCRT.
Caso 1: El cardán tiene una placa CONN muy antigua (el chipset no es 303, o fue comprado antes del 20190715)
Respuesta: No soporta control S.Bus.
Caso 2: El cardán tiene una nueva placa CONN (versión CONN azul)
Respuesta:
1. Verifique si el cableado es correcto
2. Restablecer el control S.Bus
3. Probar la función S.Bus. Si solo se soportan la mitad de las funciones, actualice la placa CONN al software más reciente.
Caso 3: Después de configurar los canales S.bus en el cardán, solo un lado funciona.
Respuesta: El cardán durante el 20190715–20200515 necesita actualizar el programa de la placa CONN y usar el método de configuración S.Bus más reciente para resolver el problema.
Caso 1: No se puede encontrar la IP del Z10N/Q30N/Q30XIR
Respuesta: Encienda el gimbal y conéctelo directamente a la computadora. Configure para obtener la red automáticamente. Use “wireshark” para capturar los datos de la red, y use el filtro para ingresar “arp” para encontrar la IP.
Caso 2: ¿No se puede encontrar la IP del gimbal de la serie T?
Respuesta:
(1) Cree una carpeta en el directorio raíz de la tarjeta TF y nómbrala como “update”.
(2) Coloque el paquete comprimido de up.tar.xz (o up.tar) directamente en la carpeta de actualización.
(3) Inserte la tarjeta TF en la ranura de la cámara cuando esté apagada.
(4) Encienda el gimbal
(5) Espere 2 minutos, apague y saque la tarjeta TF
(6) Reinicie el gimbal y la actualización está terminada.
Caso 1: Después de que la transmisión sea impulsada por el transmisor de video, la imagen del cardán está borrosa al moverse
Respuesta: La tasa de bits del transmisor de video es demasiado baja. (Mínimo 1M 720p)
Caso 2: La versión de salida IP Z40K se pondrá en negro al cambiar de modos.
Respuesta: Establezca la resolución de salida de la cámara a HDMI 1080i.
Caso 3: Serie T a través del transmisor de video LB2.
Respuesta: A. Pantalla roja a través del transmisor de video – Porque el rastreador es de versión antigua.
B. Sin salida de flujo de video a través del transmisor de video – La placa de interfaz del rastreador no es compatible.
Caso 4: ¿La conexión de los cardanes de la serie F 18x/30x a Herelink / Skydroid no puede output imágenes?
Respuesta: Problema de compatibilidad, es necesario reducir la fuente de alimentación interna de la cámara a 6.5V.
Caso 5: Transmisión UDP de la serie T, salida de marco i
Respuesta: Establezca el formato de paquete de codificación en By Slice.
Caso 6: La salida de imagen térmica parpadea
Respuesta: El transmisor de video o la antena del enlace de datos está demasiado cerca del cardán, se recomienda una distancia mínima de 35 cm.
Caso 7: Conectar a QGC, la salida de red de la serie T parpadea.
Respuesta: Establezca el formato de paquete de codificación en By Slice.
Caso 1: Salida de video y controles ONVIF del gimbal T-series
Respuesta: Actualice el firmware de salida IP más reciente para ser compatible con ONVIF (después del 20201104). Puede salir y controlar directamente por ONVIF, también soporta control TCP.
Respuesta:
T serie: rtsp://192.168.2.119:554
Z10N: rtsp://192.168.1.160:554
Z5S/Z40K: rtsp://192.168.1.100/stream0
Z-Fusion pro: rtsp://192.168.1.100:554/majorAV
Caso 1: T series no tiene salida de video después de cambiar la puerta de enlace (enrutador de 3 capas)
Respuesta: Actualizar el firmware IP de la serie T.
Caso 2: La serie T tiene un retraso anormal (normal: alrededor de 300 ms para conexión directa con PC)
Respuesta: Configurar la codificación a 720p, 2M de tasa de bits.
Respuesta: Enviar los siguientes comandos en serie para cambiar:
Desempañar alto: 81 01 04 37 02 03 FF
Luz de color: 81 01 04 49 00 00 00 0E FF
Color profundo: 81 01 04 4F 00 00 00 0E FF
Guardar configuraciones: 81 01 04 3F 01 7F FF
Respuesta: Serie F:
Fotografía /comando de grabación de acción: 81 01 04 68 xx FF
xx =:
01 Tomar una foto
02 Iniciar grabación
03 Detener grabación
04 Invertir estado de grabación
05 Cambiar a modo de grabación o modo de imagen
Consultar estado de video/foto: 81 09 04 68 FF
Retroalimentación de la cámara:
81 09 04 68 00 FF Detener grabación
81 09 04 68 01 FF Grabando
81 09 04 68 10 FF Modo de foto
Serie T:
Consultar comando de estado de la tarjeta SD:
7E 7E 44 00 00 8B 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 CD
Retroalimentación:
BB 09 01 01 02 00 00 C8 Grabando
BB 09 01 01 00 00 00 C6 Detener grabación
Respuesta:
1. Verificar caja de SDI a HDMI (serie T)
2. Verificar caja de AV a HDMI (QIR19, serie F)
3. Verificar módulo de HDMI a AV (Z-6KA7, Z-A7)
Respuesta: 81 01 04 06 02 FF Activar zoom digital
81 01 04 06 03 FF Desactivar zoom digital
81 01 04 36 00 FF Modo de combinación
81 01 04 36 01 FF Modo dividido
81 01 04 06 00 FF Detener
81 01 04 06 27 FF Tele
81 01 04 06 37 FF Amplio
81 01 04 46 00 00 0p 0q FF Acercar en modo dividido
81 01 04 47 0p 0q 0r 0s FF Acercar en modo de combinación
Configuraciones de registro/almacenamiento temporal:
81 01 04 24 mm 0p 0q ff configuración
81 09 04 24 mm ff consulta
90 50 0p 0p ff pp pp es el valor de configuración del registro
D-Zoom: 52 pq es el valor en la tabla

Respuesta:
81 01 04 3E 02 FF Modo de compensación de exposición ENCENDIDO
81 01 04 3E 03 FF Modo de compensación de exposición APAGADO
81 01 04 0E 00 FF Restablecer valor de compensación de exposición
81 01 04 0E 02 FF Aumentar valor de compensación de exposición
81 01 04 0E 03 FF Disminuir valor de compensación de exposición
81 01 04 4E 00 00 0p 0q FF Controlar directamente la posición de compensación de exposición
pq: posición de compensación de exposición

Respuesta: El ID de la cámara se puede configurar hasta 65,536 (0000h a FFFFh). Dado que esto se almacenará en la memoria interna no volátil, los datos se guardarán.
Paquete de comando para establecer el ID de la cámara
Nota: CAM_IDWrite — 81 01 04 22 0p 0q 0r 0s FF pqrs: ID de la cámara (= 0000h a FFFFh)
Retroalimentación del paquete de comando para obtener el ID de la cámara
Nota: CAM_IDInq — 81 09 04 22 FF 90 50 0p 0q 0r 0s FF pqrs: ID de la cámara
Caso 1: módulos de cámara SONY
Respuesta: CAM_Defog: On 81 01 04 37 02 0p FF p: Nivel de desneblina (1: bajo, 2: medio, 3: alto)
Off 81 01 04 37 03 00 FF
CAM_DefogInq: 81 09 04 37 FF
retroalimentación:90 50 02 0p FF p: Nivel de desneblina (1: bajo, 2: medio, 3: alto)
retroalimentación:90 50 03 00 FF Desneblina apagada
Caso 2: Z10N /Q10T /Z10TIR / Z10TL /Q10TIRM
Enviar: CAM_DefogInq 81 09 04 65 FF
Retroalimentación: 90 50 02 FF On
90 50 03 FF Off
Enviar: CAM_Defog Nivel Inq 81 09 04 65 10 FF
Retroalimentación: 90 50 0p FF p: Nivel de desneblina (0 ~ 2)
Respuesta:
Apagar el estabilizador de imagen digital: 81 01 04 34 03 FF
Encender el estabilizador de imagen digital: 81 01 04 34 02 FF
Consulta: 81 09 04 34 FF
Comentarios: 90 05 03 FF Apagar
90 05 02 FF Encender
Caso 1: La cámara de la serie F no se puede controlar
Respuesta: Mida el TX del puerto serie de la placa CONN y el RX de la cámara para ver si los dos puntos pueden estar conectados.
Si se puede conectar, haga un cable especial para probar si el puerto serie de la cámara es válido o no.
Si no se puede conectar, verifique dónde el cable está mal conectado o roto.
Caso 1: La cámara SONY no pudo enfocar en tiempos bajos
Respuesta: Envíe el comando de reinicio de la cámara: “81 01 04 3F 00 7F FF”
Caso 1: Salida HDMI de la serie T
Respuesta:
|
Salida de cámara 30fps, conectada al rastreador (SONY 7520), retraso regular de salida HDMI |
||||
|
Modelos |
Una vez |
Dos veces |
Tercera |
Promedio |
|
Mini Z10TIR / Z10TIRM |
190ms |
200ms |
190ms |
193.3ms |
|
SONY 30X |
230ms |
240ms |
230ms |
233.3ms |
|
Q10T/Z10TIR |
120ms |
80ms |
110ms |
103.3ms |
|
|
||||
|
Salida de cámara 60fps, conectada al rastreador (SONY 7520), retraso regular de salida HDMI |
||||
|
SONY 30X |
160ms |
160ms |
160ms |
160ms |
Caso 2: Retraso de salida AV de Q10F
Respuesta: El retraso regular de salida AV está entre 150~180ms.
Caso1: QIR19 no tiene salida de video a través de GCS de Skydroid H16/Herelink/…
Respuesta: El transmisor de video no soporta el formato HDMI 576i.
Caso1:Q10F / Z10F
Respuesta:
|
10xRelación de zoom óptico y Pos |
|
|
Veces |
Valor hexadecimal 0xpqrs |
|
X1 |
0000 |
|
X2 |
22BE |
|
X3 |
2D45 |
|
X4 |
3320 |
|
X5 |
371E |
|
X6 |
3A12 |
|
X7 |
3C47 |
|
X8 |
3DDF |
|
X9 |
3F64 |
|
X10 |
4000 |
Caso2:Q18F / Z18F
Respuesta:
|
18xRelación de zoom óptico y Pos |
|
|
Veces |
Valor hexadecimal 0xpqrs |
|
X1 |
0000 |
|
X2 |
18B0 |
|
X3 |
23A0 |
|
X4 |
29FE |
|
X5 |
2E74 |
|
X6 |
31 a. C. |
|
X7 |
345A |
|
X8 |
368A |
|
X9 |
385F |
|
X10 |
39F4 |
|
X11 |
3B53 |
|
X12 |
3C7F |
|
X13 |
3D79 |
|
X14 |
3E41 |
|
X15 |
3EE6 |
|
X16 |
3F5E |
|
X17 |
3FB8 |
|
X18 |
4000 |
Situación 3: Q30F / Z30F
Respuesta:
|
30xRelación de zoom óptico y Pos |
|
|
Veces |
Valor hexadecimal 0xpqrs |
|
X1 |
0000 |
|
X2 |
17 y siguientes |
|
X3 |
2222 |
|
X4 |
2834 |
|
X5 |
2c90 |
|
X6 |
2fd8 |
|
X7 |
327d |
|
X8 |
34bd |
|
X9 |
36b3 |
|
X10 |
3850 |
|
X11 |
39a3 |
|
X12 |
3ab7 |
|
X13 |
3ba5 |
|
X14 |
3c6d |
|
X15 |
3d04 |
|
X16 |
3d81 |
|
X17 |
3df2 |
|
X18 |
3e4a |
|
X19 |
3E95 |
|
X20.1 |
3ee0 |
|
X21 |
3f06 |
|
X22.3 |
3f38 |
|
X23.2 |
3f5e |
|
X24.2 |
3f83 |
|
X25.1 |
3fa9 |
|
X26.2 |
3fce |
|
X27.5 |
3fe7 |
|
X29 |
4000 |
|
X30 |
4000 |
Caso4: Z10TIR, Z10TL, Z10N, Q10T, Q10N y así sucesivamente
Respuesta:
|
Relación de zoom |
POS hexadecimal 0xpqrs |
Campo de visión H |
En FOV |
D FOV |
EFFL |
|
1X |
0000 |
53 |
30 |
62 |
5.1 |
|
2X |
1816 |
32.8 |
17.5 |
35 |
9,99 |
|
3X |
240B |
21.4 |
12.4 |
24.7 |
15.08 |
|
4X |
2BC7 |
17 |
9.6 |
19.6 |
20.31 |
|
5X |
31AB |
13.6 |
7.6 |
15.6 |
25.3 |
|
6X |
363D |
11.4 |
6.4 |
13 |
30.2 |
|
7X |
39B6 |
10 |
5.6 |
11.4 |
35.8 |
|
8X |
3C65 |
9.4 |
5.1 |
10.6 |
40,74 |
|
9X |
3E81 |
8.2 |
4.2 |
9 |
46.2 |
|
10X |
4000 |
7.8 |
4 |
8.5 |
51 |
Caso5: MiniZ10TIR/ Z10TIRM/ Q10TIR-35/ Z10TIR-35 y así sucesivamente
Respuesta :
|
Relación de zoom |
Datos de posición de zoom (hexadecimal) |
Campo de visión H (tú) |
|
x1 |
0000 |
59.2 |
|
x2 |
18C3 |
32.8 |
|
x3 |
2430 |
22.2 |
|
x4 |
2B0C |
16.9 |
|
x5 |
3049 |
13.6 |
|
x6 |
3430 |
11.5 |
|
x7 |
37CF |
9.8 |
|
x8 |
3AAA |
8.6 |
|
x9 |
3D86 |
7.7 |
|
x10 |
4000 |
6.7 |
Caso 6: Z40K/ Z40KT/ Z40TIR/ Q40TIR módulo de cámara 4K Panasonic
|
Relación de zoom |
35 mm F |
D |
16 |
9 |
|
Campo de visión H |
En FOV |
|||
|
Ancho |
30.8 |
70.17 |
62,95 |
38.00 |
|
2 |
61.6 |
38,70 |
34.04 |
19.54 |
|
3 |
92.4 |
26.35 |
23.07 |
13.10 |
|
4 |
123.2 |
19.92 |
17.40 |
9.84 |
|
5 |
154.0 |
15,99 |
13,96 |
7.88 |
|
6 |
184.8 |
13.35 |
11.65 |
6.57 |
|
7 |
215,6 |
11.46 |
10.00 |
5.63 |
|
8 |
246.4 |
10.03 |
8,75 |
4,93 |
|
9 |
277.2 |
8.92 |
7,78 |
4.38 |
|
10 |
308.0 |
8.04 |
7.01 |
3,94 |
|
11 |
338.8 |
7.31 |
6.37 |
3.59 |
|
12 |
369,6 |
6.70 |
5.84 |
3.29 |
|
13 |
400.4 |
6.19 |
5.39 |
3.03 |
|
14 |
431.2 |
5,74 |
5.01 |
2.82 |
|
15 |
462.0 |
5.36 |
4,67 |
2,63 |
|
16 |
492.8 |
5.03 |
4.38 |
2.47 |
|
17 |
523.6 |
4,73 |
4.12 |
2.32 |
|
18 |
554.4 |
4.47 |
3.90 |
2.19 |
|
19 |
585.2 |
4.23 |
3,69 |
2.08 |
|
Mucho |
626.0 |
3,96 |
3.45 |
1,94 |
Caso6: Q30T pro/ Q30TIR/ Q30TIRM pro etc MÓDULO DE CÁMARA SONY 30x
Respuesta: Consulte el apéndice.
Caso 1: El cardán está conectado directamente al módulo GPS
Respuesta: 1) Cambie la velocidad de baudios del módulo GPS a 115200, GPS tiene salida de información GGA o RMC bajo el protocolo NEMA-0183. 2) Conecte cruzado TX y RX y envíe los datos al puerto serie del cardán.
Caso 2: El control de vuelo de código abierto envía información GPS al GPS del cardán
Respuesta: Conectando con el módulo GPS, el control de vuelo enviará datos GPS GLOBAL_POSITION_INT (#33) al puerto serie del cardán a través del puerto telem FC (configuración: 115200, Mavlink1);
Caso 3: Necesita desarrollo: Enviar datos GPS al puerto serie del cardán a través del protocolo de análisis de posición del puerto serie o el formato de paquete M en el protocolo Viewlink.
Solución 1: Configurar mediante Viewlink: Conectar el cardán a Viewlink a través del puerto serie o TCP, en Viewlink: "Configuración" -> "Configuración OSD" -> Activar "GPS" y "Entrada GPS" -> "Guardar"
Solución 2: Configurar comandos serie a través del asistente de puerto serie: "AA 55 05 00 FF" (Mostrar GPS en OSD), "AA 55 07 B7 FF" (guardar OSD)
Respuesta: Envíe cualquiera de los siguientes comandos para verificar si la información GPS se puede mostrar o no.
(1){7E 7E 44 80 00 83 37 E4 07 09 10 10 05 31 00 00 00 00 00 00 00 00 00 00 00 00 00 24 83 90 02 72 DA 44 40 7F 82 CB E7 40 DC 5E 40 00 00 48 42 C4}
(2){7E 7E 44 80 00 83 37 E4 07 09 10 10 05 31 00 00 00 00 00 00 00 00 00 00 00 00 00 24 83 90 02 72 DA 44 C0 7F 82 CB E7 40 DC 5E C0 00 00 48 42 C4}
(3){F9 FB E3 07 0A 0B 0C 0D 13 15 F0 6C 3C B7 FD 84 3C 62 C9 91 40 0E 3F 57 17 59 B4 F7 45 00 00 00 00 40}
(4){55 aa dc 6d b1 07 00 00 00 00 00 00 00 00 8f ff 62 e3 23 6c 94 50 96 33 00 00 00 0d 40 1d ad 43 a2 68 bb 00 00 06 ea 00 00 00 f0 00 f0 00 00 27}
(5){$GPRMC,023543.00,A,2308.28715,N,11322.09875,E,0.195,,240213,,,A*78}
Respuesta: Enviar comando serial “AA 55 04 08 FF”, “08” representa la zona Este 8, Este es positivo y Oeste es negativo. Enviar comandos para cambiar la zona de acuerdo con la ubicación. Este comando se adapta al caso en que los datos de GPS o de control de vuelo están conectados, y no se puede usar con el protocolo M. Se necesita proporcionar información de tiempo correcta.
F9 FB E3 07 0A 0B 0C 00 00 15 F0 6C 3C B7 FD 84 3C 62 C9 91 40 0E 3F 57 17 59 B4 F7 45 00 00 00 00 20 (2019.10.11 12:00:00)
Nota:
Actualizar protocolo de zona horaria:
AA 55 04 HH FF AA 55 34 MM FF HH es un entero con signo, es la hora de la zona horaria, y MM es un minuto de la zona horaria, también un entero con signo.
Por ejemplo, para establecer a -5:30: AA 55 04 FB FF AA 55 34 E2 FF
Respuesta: Sigue enviando comandos con entrada de tiempo/GPS, comando del protocolo Viewlink “55 AA DC 11 30 00 01 00 3F FC 00 00 00 00 04 D0 00 00 00 37″ para tomar fotos con atributos de tiempo o GPS.
Por ejemplo:
Enviar: F9 FB E3 07 0A 0B 0C 0D 13 15 F0 6C 3C B7 FD 84 3C 62 C9 91 40 0E 3F 57 17 59 B4 F7 45 00 00 00 00 40
Recibir: FE FC E3 07 0A 0B 0C 0D 13 00 00 00 00 00 00 DB 0F C9 B9 6A D9 2E 40 00 00 A0 40 15 F0 6C 3C B7 FD 84 3C 62 C9 91 40 00 00 00 00 3D A3 64 88 E7 DE E5 3F A6 22 7C 04 E4 63 00 40 14 EF 62 6A E8 DE E5 3F 18 44 23 77 E4 63 00 40 F9
Explicación:
E3 07 0A 0B: 2019.10.11
0B 0C 0D: 12:13:19
0E 3F 57 17: int32 0x17573F0E: 39.1593742° –>39°09”33.75’
0.1593742*60=9.562452–>0.562452*60=33.74712
00 00 A0 40: float big endian 0x40A00000–》5m
Respuesta:
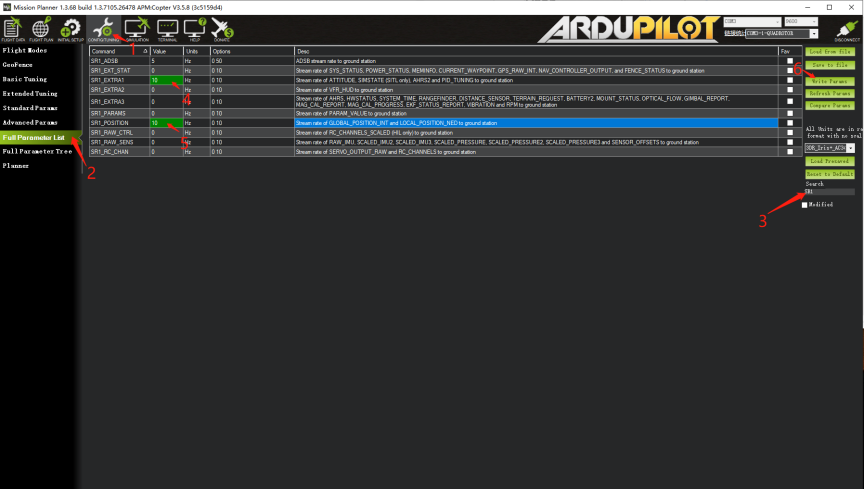
Conecte el puerto serie del cardán a un TELEM de un controlador de vuelo de código abierto (por ejemplo: Pixhawk) para compensar la deriva del horizonte durante el vuelo de alta dinámica.
Configuraciones de parámetros del puerto TELEM del FC: velocidad en baudios 115200, MAvlink1.
Establezca los parámetros en ArduPilot:
•SERIALx_BAUD = 115
•SERIALx_PROTOCOL = 1
Donde “x” es el número de puerto. El valor es 1 (Mavlink).
Además, establezca las siguientes tasas de mensajes para este puerto:
•SRx_EXTRA1 = 10
•SRx_POSITION = 10
Nota: Todos los demás parámetros SRx_xx deben establecerse en 0 para evitar que datos innecesarios sobrecarguen el canal.
Respuesta:
(1) Inclinación del eje de rodillo: Apagar los datos de SR1_EXRA3
(2) Gran retraso: Cambiar SRx_RC_CHAN a 20HZ
(3) Sin respuesta al control del puerto serie FC Mavlink: El programa es más antiguo que 20210429. Actualizar.
Caso 1: Pixhawk, Pixkack/ V3 FC se conecta a RSSI, V5 series FC se conecta al pin SBUS_out
Respuesta: BRD_SBUS_OUT configurado en 1 (50 Hz)
SERVO_SBUS_OUT valor predeterminado: 50
BRD_SAFETYENABLE cambiar el valor predeterminado de 1 a 0, o activar el botón de seguridad.
Caso 2: La serie X7 FC no tiene una interfaz SBUS_OUT independiente, la señal SBUS se emite directamente a través del puerto serie.
Respuesta: SERIAL4_PROTOCOL establecido en 15
SERIAL4_OPTIONS establecido en 2
Después de la configuración anterior, el pin TX de la interfaz FC uart4 emitirá la señal SBUS. De manera similar, otros puertos serie también se pueden configurar como salida SBUS.
Método de control:
Servo8 configurado como 56, el canal 6 del RC controla la salida del canal 8 por FC, que es para controlar la salida del canal 8 por SBUS.
Apéndice:
|
Relación de zoom óptico SONY 30x y posición |
||||
|
índice |
POS hexadecimal 0xpqrs |
Relación de zoom |
Campo de visión H |
En FOV |
|
0 |
0 |
1.00 |
63,7 |
38.5 |
|
1 |
40 |
1.01 |
63.1 |
38.1 |
|
2 |
80 |
1.01 |
63.1 |
38.1 |
|
3 |
C0 |
1.02 |
62.6 |
37.8 |
|
4 |
100 |
1.03 |
62.1 |
37.4 |
|
5 |
140 |
1.03 |
62.1 |
37.4 |
|
6 |
180 |
1.04 |
61.7 |
37.1 |
|
7 |
1C0 |
1.05 |
61.2 |
36.8 |
|
8 |
200 |
1.05 |
61.2 |
36.8 |
|
9 |
240 |
1.06 |
60.7 |
36,5 |
|
10 |
280 |
1.07 |
60.2 |
36.1 |
|
11 |
2C0 |
1.07 |
60.2 |
36.1 |
|
12 |
300 |
1.08 |
59.8 |
35.8 |
|
13 |
340 |
1.09 |
59.3 |
35.5 |
|
14 |
380 |
1.10 |
58.9 |
35.2 |
|
15 |
3C0 |
1.10 |
58.9 |
35.2 |
|
16 |
400 |
1.11 |
58.4 |
34.9 |
|
17 |
440 |
1.12 |
58.0 |
34.6 |
|
18 |
480 |
1.13 |
57.6 |
34.3 |
|
19 |
4C0 |
1.13 |
57.6 |
34.3 |
|
20 |
500 |
1.14 |
57.1 |
34.1 |
|
21 |
540 |
1.15 |
56.7 |
33.8 |
|
22 |
580 |
1.16 |
56.3 |
33,5 |
|
23 |
5C0 |
1.16 |
56.3 |
33,5 |
|
24 |
600 |
1.17 |
55.9 |
33.2 |
|
25 |
640 |
1.18 |
55.5 |
33.0 |
|
26 |
680 |
1.19 |
55.1 |
32.7 |
|
27 |
6C0 |
1.20 |
54.7 |
32.4 |
|
28 |
700 |
1.21 |
54.3 |
32.2 |
|
29 |
740 |
1.21 |
54.3 |
32.2 |
|
30 |
780 |
1.22 |
53.9 |
31.9 |
|
31 |
7C0 |
1.23 |
53.6 |
31.7 |
|
32 |
800 |
1.24 |
53.2 |
31.4 |
|
33 |
840 |
1,25 |
52.8 |
31.2 |
|
34 |
880 |
1.26 |
52.5 |
31.0 |
|
35 |
8C0 |
1.27 |
52.1 |
30.7 |
|
36 |
900 |
1.28 |
51.7 |
30.5 |
|
37 |
940 |
1.29 |
51.4 |
30.3 |
|
38 |
980 |
1.30 |
51.1 |
30.1 |
|
39 |
9C0 |
1.31 |
50.7 |
29.8 |
|
40 |
A00 |
1.32 |
50.4 |
29.6 |
|
41 |
A40 |
1.33 |
50.0 |
29.4 |
|
42 |
A80 |
1.34 |
49.7 |
29.2 |
|
43 |
AC0 |
1.35 |
49.4 |
29.0 |
|
44 |
B00 |
1.36 |
49.1 |
28.8 |
|
45 |
B40 |
1.37 |
48.8 |
28.6 |
|
46 |
B80 |
1.38 |
48.4 |
28.4 |
|
47 |
BC0 |
1.39 |
48.1 |
28.2 |
|
48 |
C00 |
1.40 |
47.8 |
28.0 |
|
49 |
Q40 |
1.41 |
47.5 |
27.8 |
|
50 |
C80 |
1.42 |
47.2 |
27.6 |
|
51 |
CC0 |
1.43 |
46.9 |
27.4 |
|
52 |
D00 |
1.44 |
46.6 |
27.3 |
|
53 |
D40 |
1.45 |
46.4 |
27.1 |
|
54 |
D80 |
1.46 |
46.1 |
26.9 |
|
55 |
DC0 |
1.48 |
45.5 |
26.5 |
|
56 |
E00 |
1.49 |
45.2 |
26.4 |
|
57 |
E40 |
1.50 |
45.0 |
26.2 |
|
58 |
E80 |
1.51 |
44.7 |
26.0 |
|
59 |
EC0 |
1.52 |
44.4 |
25.9 |
|
60 |
F00 |
1.54 |
43.9 |
25.5 |
|
61 |
F40 |
1.55 |
43,7 |
25.4 |
|
62 |
F80 |
1,56 |
43.4 |
25.2 |
|
63 |
FC0 |
1,57 |
43.1 |
25.1 |
|
64 |
1000 |
1.59 |
42.7 |
24.8 |
|
65 |
1040 |
1.60 |
42.4 |
24.6 |
|
66 |
1080 |
1.61 |
42.2 |
24.5 |
|
67 |
10C0 |
1,63 |
41.7 |
24.2 |
|
68 |
1100 |
1,64 |
41.5 |
24.0 |
|
69 |
1140 |
1,65 |
41.2 |
23.9 |
|
70 |
1180 |
1,67 |
40.8 |
23.6 |
|
71 |
11C0 |
1,68 |
40.6 |
23.5 |
|
72 |
1200 |
1.70 |
40.1 |
23.2 |
|
73 |
1240 |
1.71 |
39.9 |
23.1 |
|
74 |
1280 |
1,72 |
39,7 |
22.9 |
|
75 |
12C0 |
1,74 |
39.3 |
22.7 |
|
76 |
1300 |
1,75 |
39.1 |
22.6 |
|
77 |
1340 |
1,77 |
38,7 |
22.3 |
|
78 |
1380 |
1,79 |
38.3 |
22.1 |
|
79 |
13C0 |
1.80 |
38.1 |
21.9 |
|
80 |
1400 |
1,82 |
37,7 |
21.7 |
|
81 |
1440 |
1,83 |
37,5 |
21.6 |
|
82 |
1480 |
1,85 |
37.1 |
21.4 |
|
83 |
14C0 |
1,87 |
36,7 |
21.1 |
|
84 |
1500 |
1,88 |
36,5 |
21.0 |
|
85 |
1540 |
1.90 |
36.2 |
20.8 |
|
86 |
1580 |
1,92 |
35.8 |
20.6 |
|
87 |
15C0 |
1,94 |
35.5 |
20.4 |
|
88 |
1600 |
1,95 |
35.3 |
20.3 |
|
89 |
1640 |
1,97 |
35.0 |
20.1 |
|
90 |
1680 |
1,99 |
34.6 |
19.9 |
|
91 |
16C0 |
2.01 |
34.3 |
19.7 |
|
92 |
1700 |
2.03 |
34.0 |
19.5 |
|
93 |
1740 |
2.05 |
33,7 |
19.3 |
|
94 |
1780 |
2.07 |
33.4 |
19.1 |
|
95 |
17C0 |
2.09 |
33.1 |
19.0 |
|
96 |
1800 |
2.11 |
32.8 |
18.8 |
|
97 |
1840 |
2.13 |
32.5 |
18.6 |
|
98 |
1880 |
2.15 |
32.2 |
18.4 |
|
99 |
18C0 |
2.17 |
31.9 |
18.3 |
|
100 |
1900 |
2.19 |
31.6 |
18.1 |
|
101 |
1940 |
2.21 |
31.4 |
17.9 |
|
102 |
1980 |
2.23 |
31.1 |
17.8 |
|
103 |
19C0 |
2.26 |
30.7 |
17.5 |
|
104 |
1A00 |
2.28 |
30.5 |
17.4 |
|
105 |
1A40 |
2.30 |
30.2 |
17.2 |
|
106 |
1A80 |
2.32 |
29.9 |
17.1 |
|
107 |
1AC0 |
2.35 |
29.6 |
16.9 |
|
108 |
1B00 |
2.37 |
29.3 |
16.7 |
|
109 |
1B40 |
2.40 |
29.0 |
16.5 |
|
110 |
1B80 |
2.42 |
28.8 |
16.4 |
|
111 |
1BC0 |
2.45 |
28.4 |
16.2 |
|
112 |
1C00 |
2.47 |
28.2 |
16.1 |
|
113 |
1C40 |
2.50 |
27.9 |
15.9 |
|
114 |
1C80 |
2.53 |
27.6 |
15.7 |
|
115 |
1CC0 |
2.55 |
27.3 |
15.6 |
|
116 |
1D00 |
2.58 |
27.0 |
15.4 |
|
117 |
1D40 |
2.61 |
26.7 |
15.2 |
|
118 |
1D80 |
2,64 |
26.4 |
15.0 |
|
119 |
1DC0 |
2,66 |
26.3 |
14.9 |
|
120 |
1E00 |
2,69 |
26.0 |
14.8 |
|
121 |
1E40 |
2,72 |
25.7 |
14.6 |
|
122 |
1E80 |
2,75 |
25.4 |
14.4 |
|
123 |
1EC0 |
2,78 |
25.2 |
14.3 |
|
124 |
1F00 |
2.82 |
24.8 |
14.1 |
|
125 |
1F40 |
2,85 |
24.6 |
13.9 |
|
126 |
1F80 |
2,88 |
24.3 |
13.8 |
|
127 |
1FC0 |
2.91 |
24.1 |
13.7 |
|
128 |
2000 |
2,95 |
23.7 |
13.5 |
|
129 |
2040 |
2,98 |
23.5 |
13.3 |
|
130 |
2080 |
3.02 |
23.2 |
13.2 |
|
131 |
20C0 |
3.05 |
23.0 |
13.0 |
|
132 |
2100 |
3.09 |
22.7 |
12.9 |
|
133 |
2140 |
3.12 |
22.5 |
12.7 |
|
134 |
2180 |
3.16 |
22.2 |
12.6 |
|
135 |
21C0 |
3.20 |
21.9 |
12.4 |
|
136 |
2200 |
3.24 |
21.7 |
12.3 |
|
137 |
2240 |
3.28 |
21.4 |
12.1 |
|
138 |
2280 |
3.32 |
21.2 |
12.0 |
|
139 |
22C0 |
3.36 |
20.9 |
11.8 |
|
140 |
2300 |
3.40 |
20.7 |
11.7 |
|
141 |
2340 |
3.44 |
20.4 |
11.6 |
|
142 |
2380 |
3.49 |
20.1 |
11.4 |
|
143 |
23C0 |
3.53 |
19.9 |
11.3 |
|
144 |
2400 |
3.57 |
19.7 |
11.1 |
|
145 |
2440 |
3.62 |
19.4 |
11.0 |
|
146 |
2480 |
3,67 |
19.2 |
10.8 |
|
147 |
24C0 |
3.71 |
19.0 |
10.7 |
|
148 |
2500 |
3,76 |
18.7 |
10.6 |
|
149 |
2540 |
3.81 |
18.5 |
10.4 |
|
150 |
2580 |
3,86 |
18.2 |
10.3 |
|
151 |
25C0 |
3.91 |
18.0 |
10.2 |
|
152 |
2600 |
3,97 |
17.7 |
10.0 |
|
153 |
2640 |
4.02 |
17.5 |
9.9 |
|
154 |
2680 |
4.07 |
17.3 |
9.8 |
|
155 |
26C0 |
4.13 |
17.1 |
9.6 |
|
156 |
2700 |
4.19 |
16.8 |
9.5 |
|
157 |
2740 |
4.24 |
16.6 |
9.4 |
|
158 |
2780 |
4.30 |
16.4 |
9.3 |
|
159 |
27C0 |
4.36 |
16.2 |
9.1 |
|
160 |
2800 |
4.43 |
15.9 |
9.0 |
|
161 |
2840 |
4.49 |
15.7 |
8.9 |
|
162 |
2880 |
4.55 |
15.5 |
8.7 |
|
163 |
28C0 |
4.62 |
15.3 |
8.6 |
|
164 |
2900 |
4,68 |
15.1 |
8.5 |
|
165 |
2940 |
4,75 |
14.9 |
8.4 |
|
166 |
2980 |
4.82 |
14.6 |
8.3 |
|
167 |
29C0 |
4.89 |
14.4 |
8.1 |
|
168 |
2A00 |
4,97 |
14.2 |
8.0 |
|
169 |
2A40 |
5.04 |
14.0 |
7.9 |
|
170 |
2A80 |
5.12 |
13.8 |
7.8 |
|
171 |
2AC0 |
5.19 |
13.6 |
7.7 |
|
172 |
2B00 |
5.27 |
13.4 |
7.5 |
|
173 |
2B40 |
5.35 |
13.2 |
7.4 |
|
174 |
2B80 |
5.44 |
13.0 |
7.3 |
|
175 |
2BC0 |
5.52 |
12.8 |
7.2 |
|
176 |
2C00 |
5.61 |
12.6 |
7.1 |
|
177 |
2C40 |
5.69 |
12.4 |
7.0 |
|
178 |
2C80 |
5,78 |
12.2 |
6.9 |
|
179 |
2CC0 |
5.88 |
12.0 |
6.8 |
|
180 |
2D00 |
5,97 |
11.8 |
6.7 |
|
181 |
2D40 |
6.07 |
11.6 |
6.5 |
|
182 |
2D80 |
6.17 |
11.4 |
6.4 |
|
183 |
2DC0 |
6.27 |
11.3 |
6.3 |
|
184 |
2E00 |
6.37 |
11.1 |
6.2 |
|
185 |
2E40 |
6.47 |
10.9 |
6.1 |
|
186 |
2E80 |
6.58 |
10.7 |
6.0 |
|
187 |
2EC0 |
6,69 |
10.6 |
5.9 |
|
188 |
2F00 |
6.80 |
10.4 |
5.8 |
|
189 |
2F40 |
6.92 |
10.2 |
5.7 |
|
190 |
2F80 |
7.03 |
10.0 |
5.7 |
|
191 |
2FC0 |
7.15 |
9.9 |
5.6 |
|
192 |
3000 |
7.28 |
9.7 |
5.5 |
|
193 |
3040 |
7.40 |
9.5 |
5.4 |
|
194 |
3080 |
7.53 |
9.4 |
5.3 |
|
195 |
30C0 |
7,66 |
9.2 |
5.2 |
|
196 |
3100 |
7,79 |
9.1 |
5.1 |
|
197 |
3140 |
7,93 |
8.9 |
5.0 |
|
198 |
3180 |
8.07 |
8.7 |
4.9 |
|
199 |
31C0 |
8.21 |
8.6 |
4.8 |
|
200 |
3200 |
8.35 |
8.4 |
4.8 |
|
201 |
3240 |
8.50 |
8.3 |
4.7 |
|
202 |
3280 |
8,65 |
8.2 |
4.6 |
|
203 |
32C0 |
8.81 |
8.0 |
4.5 |
|
204 |
3300 |
8,97 |
7.9 |
4.4 |
|
205 |
3340 |
9.13 |
7.7 |
4.3 |
|
206 |
3380 |
9.29 |
7.6 |
4.3 |
|
207 |
33C0 |
9.46 |
7.5 |
4.2 |
|
208 |
3400 |
9.63 |
7.3 |
4.1 |
|
209 |
3440 |
9.80 |
7.2 |
4.0 |
|
210 |
3480 |
9,98 |
7.1 |
4.0 |
|
211 |
34C0 |
10.16 |
6.9 |
3.9 |
|
212 |
3500 |
10.35 |
6.8 |
3.8 |
|
213 |
3540 |
10.54 |
6.7 |
3.8 |
|
214 |
3580 |
10,73 |
6.6 |
3.7 |
|
215 |
35C0 |
10,93 |
6.4 |
3.6 |
|
216 |
3600 |
11.13 |
6.3 |
3.6 |
|
217 |
3640 |
11.33 |
6.2 |
3.5 |
|
218 |
3680 |
11.54 |
6.1 |
3.4 |
|
219 |
36C0 |
11,75 |
6.0 |
3.4 |
|
220 |
3700 |
11.97 |
5.9 |
3.3 |
|
221 |
3740 |
12.19 |
5.8 |
3.2 |
|
222 |
3780 |
12.41 |
5.7 |
3.2 |
|
223 |
37C0 |
12.64 |
5.6 |
3.1 |
|
224 |
3800 |
12.88 |
5.5 |
3.1 |
|
225 |
3840 |
13.12 |
5.4 |
3.0 |
|
226 |
3880 |
13.36 |
5.3 |
3.0 |
|
227 |
38C0 |
13.61 |
5.2 |
2.9 |
|
228 |
3900 |
13.87 |
5.1 |
2.8 |
|
229 |
3940 |
14.13 |
5.0 |
2.8 |
|
230 |
3980 |
14.40 |
4.9 |
2.7 |
|
231 |
39C0 |
14.67 |
4.8 |
2.7 |
|
232 |
3A00 |
14,95 |
4.7 |
2.6 |
|
233 |
3A40 |
15.24 |
4.6 |
2.6 |
|
234 |
3A80 |
15.54 |
4.5 |
2.5 |
|
235 |
3AC0 |
15.85 |
4.4 |
2.5 |
|
236 |
3B00 |
16.17 |
4.3 |
2.4 |
|
237 |
3B40 |
16.50 |
4.2 |
2.4 |
|
238 |
3B80 |
16.84 |
4.2 |
2.3 |
|
239 |
3BC0 |
17.20 |
4.1 |
2.3 |
|
240 |
3C00 |
17.57 |
4.0 |
2.2 |
|
241 |
3C40 |
17,96 |
3.9 |
2.2 |
|
242 |
3C80 |
18.36 |
3.8 |
2.1 |
|
243 |
3CC0 |
18.79 |
3.7 |
2.1 |
|
244 |
3D00 |
19.25 |
3.6 |
2.0 |
|
245 |
3D40 |
19.73 |
3.5 |
2.0 |
|
246 |
3D80 |
20.25 |
3.4 |
1.9 |
|
247 |
3DC0 |
20.81 |
3.3 |
1.9 |
|
248 |
3E00 |
21.41 |
3.3 |
1.8 |
|
249 |
3E40 |
22.07 |
3.2 |
1.8 |
|
250 |
3E80 |
22.80 |
3.1 |
1.7 |
|
251 |
3EC0 |
23.60 |
2.9 |
1.7 |
|
252 |
3F00 |
24.51 |
2.8 |
1.6 |
|
253 |
3F40 |
25.55 |
2.7 |
1.5 |
|
254 |
3F80 |
26,76 |
2.6 |
1.5 |
|
255 |
3FC0 |
28.21 |
2.5 |
1.4 |
|
256 |
4000 |
30.00 |
2.3 |
1.3 |