



















.jpeg?w=1200&h=2526)









उत्पाद परिचय
विनिर्देश
U30TIRM-HD विशिष्टता
| हार्डवेयर पैरामीटर | |
| कार्यशील वोल्टेज | 16 वी |
| इनपुट वोल्टेज | 4एस ~ 6एस (14.8वी~25.2वी) |
| आउटपुट वोल्टेज | 5V (PWM से कनेक्ट करें) |
| गतिशील धारा | 850~1500mA @16V |
| बिजली की खपत | औसत 13.6W, अधिकतम 24W |
| कार्य वातावरण का तापमान | -20℃ ~ +50℃ |
| आउटपुट (वैकल्पिक) | आईपी (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| स्थानीय भंडारण | TF कार्ड (512G तक, क्लास 10, FAT32 प्रारूप) |
| TF कार्ड में चित्र संग्रहण प्रारूप | जेपीजी(1920*1080) |
| TF कार्ड में वीडियो संग्रहण प्रारूप | एमपी4(1080पी 30एफपीएस) |
| नियंत्रण विधि | पीडब्लूएम / टीटीएल / एस.बस / टीसीपी / यूडीपी |
| जिम्बल स्पेक | |
| मैकेनिकल रेंज | पिच/टिल्ट: -45°~135°, यॉ/पैन: ±360°*N |
| नियंत्रण योग्य रेंज | पिच/टिल्ट: -40°~130°, यॉ/पैन: ±360°*N |
| कंपन कोण | पिच/रोल/यॉ: ±0.02° |
| केंद्र तक पहुंचने के लिए एक कुंजी | √ |
| ईओ कैमरा विनिर्देश | |
| इमेजर सेंसर | 1/2.8 प्रकार STARVIS2 CMOS सेंसर |
| चित्र की गुणवत्ता | पूर्ण HD 1080 (1920*1080) |
| प्रभावी पिक्सेल | 2.13एमपी |
| लेंस ऑप्टिकल ज़ूम | 30x, एफ=4.3~129मिमी |
| डिजिटल ज़ूम | 12x (ऑप्टिकल ज़ूम के साथ 360x) |
| न्यूनतम वस्तु दूरी | 10 मिमी (चौड़ा छोर) से 1200 मिमी (टेली छोर) |
| क्षैतिज दृश्य कोण | 64.0°(चौड़ा छोर) ~ 2.4°(टेली छोर) |
| एस/एन अनुपात | 50dB से अधिक |
| न्यूनतम रोशनी | रंग 0.009 लक्स (1/30 सेकंड, 50%, उच्च संवेदनशीलता मोड चालू) |
| रंग 0.09 लक्स (1/30 सेकंड, 50%, उच्च संवेदनशीलता मोड बंद) | |
| एक्सपोज़र नियंत्रण | ऑटो, मैनुअल, प्राथमिकता मोड (शटर प्राथमिकता और आईरिस प्राथमिकता), ईवी मुआवजा, धीमा एई |
| पाना | ऑटो/मैनुअल 0dB से 50.0dB (0 से 28 चरण) अधिकतम लाभ सीमा 10.7 dB से 50.0dB (6 से 28 चरण) |
| श्वेत संतुलन | ऑटो, ATW, इनडोर, आउटडोर, वन पुश WB, मैनुअल WB, आउटडोर ऑटो, सोडियम वाष्प लैंप |
| शटर गति | 1/1s से 1/10,000s, 22 कदम |
| बैक लाइट क्षतिपूर्ति | बंद |
| शोर में कमी | बंद |
| छवि स्थिरीकरण | बंद |
| कोहरा हटाना | बंद |
| आईआर थर्मल इमेजर विशिष्टता | |
| फोकस लंबाई | 50 मिमी |
| क्षैतिज FOV | 17.5° |
| ऊर्ध्वाधर FOV | 14.0° |
| जासूसी दूरी (पुरुष: 1.8x0.5 मीटर) | 2083 मीटर |
| दूरी पहचानें (पुरुष: 1.8x0.5 मीटर) | 521 मीटर |
| सत्यापित दूरी (पुरुष: 1.8x0.5 मीटर) | 260 मीटर |
| जासूसी दूरी (कार: 4.2x1.8 मीटर) | 6389 मीटर |
| दूरी पहचानें (कार: 4.2x1.8 मीटर) | 1597 मीटर |
| सत्यापित दूरी (कार: 4.2x1.8मी) | 799 मीटर |
| कार्य मोड | अनकूल्ड दीर्घ तरंग (8μm~14μm) थर्मल इमेजर |
| डिटेक्टर पिक्सेल | 1280*1024 |
| पिक्सेल पिच | 12μm |
| ध्यान केन्द्रित करने की विधि | एथर्मल प्राइम लेंस |
| एनईटीडी | ≤40mK@25℃,F #1.0 |
| एमआरटीडी | ≤400mK@25℃,F #1.0 |
| शटर | बिस्टेबल शटर |
| रंगो की पटिया | सफेद, काला, छद्म रंग |
| डिजिटल ज़ूम | 1x ~ 4x |
| थर्मोमेट्री प्रकार | समर्थित नहीं |
| ईओ / आईआर कैमरा ऑब्जेक्ट ट्रैकिंग | |
| विचलन पिक्सेल की दर अद्यतन करें | 50हर्ट्ज |
| विचलन पिक्सेल का आउटपुट विलंब | 5एमएस |
| न्यूनतम ऑब्जेक्ट कंट्रास्ट | 5% |
| सीनियर | 4 |
| न्यूनतम ऑब्जेक्ट आकार | 32*32 पिक्सेल |
| अधिकतम ऑब्जेक्ट आकार | 128*128 पिक्सेल |
| ट्रैकिंग गति | ±48 पिक्सेल/फ़्रेम |
| ऑब्जेक्ट मेमोरी समय | 100 फ्रेम (4s) |
वस्तु की स्थिति में पल्स शोर का माध्य वर्गमूल मान |
< 0.5 पिक्सेल |
| आईआर लेजर रेंजफाइंडर | |
| मापने की क्षमता | बड़े लक्ष्य के लिए ≥5 किमी (जैसे इमारत) कार के लिए ≥3 किमी (2.3 मीटर × 2.3 मीटर) लोगों के लिए ≥1.5 किमी (1.75 मीटर × 0.75 मीटर) (विशिष्ट मूल्य के आधार पर: एलओएस दृश्यता: ≥8 किमी विसरित प्रतिबिंब दर: ≥0.3 आर्द्रता: ≤80%) |
| सटीकता (विशिष्ट मान) | ≤ ±1मी (आरएमएस) |
| तरंग लंबाई | 1535nm पल्स लेजर |
| अपसारी कोण | ≤ 0.5एमआरएडी |
| माप आवृत्ति | 1~10हर्ट्ज |
| न्यूनतम माप सीमा | ≤20मी |
| स्थान समाधान | लक्ष्य का अक्षांश और देशांतर |
| रानेफाइंडर | स्क्रीन के केंद्र में स्थित वस्तु और लेजर रेंजफाइंडर के बीच की दूरी मापें |
| विशेषताएँ | |
| ओएसडी | जिम्बल का यॉ और पिच कोण, आवर्धन, रेंजिंग मान, कार्ड रिकॉर्डिंग अवधि, विमान GPS और ऊंचाई या लक्ष्य रेंजिंग बिंदु GPS और ऊंचाई (उनमें से एक चुनें, और t t i i t GPS d ltit d ) d t d ti प्रदर्शित करें |
| जियोटैगिंग | डेयर्सगपेला एटीएनआई एनपीडीओ पीएस सीओ रंडीन ट्यूइन आईसीटी आर एक्सएनआईएफ मी |
| ऑनलाइन कार्ड रीडिंग | SMB चित्र या वीडियो पढ़ें / HTTP चित्र या वीडियो पढ़ें |
| केएलवी (यूडीपी) | कार्ड रिकॉर्डिंग या व्यूलिंक वीडियो प्लेबैक |
| अर्दुपायलट / PX4 | समर्थन (Mavlink प्रोटोकॉल) वैकल्पिक: Ardupilot फ़ॉलो मी सुविधा का समर्थन करें |
| वीडियो सिलाई | ईओ+आईआर /आईआर+ईओ /ईओ /आईआर |
| दोहरी वीडियो स्ट्रीम आउटपुट | समर्थन नहीं (ईओ और आईआर दो स्ट्रीम आउटपुट) |
| पैकिंग जानकारी | |
| उत्तरपश्चिम | 1625±10g(व्यूपोर्ट के साथ व्यूपोर्ट संस्करण) |
| उत्पाद माप. | 155*143.5*232.1मिमी / 155*143.5*237.8मिमी (व्यूपोर्ट के साथ व्यूपोर्ट संस्करण) |
| सामान | 1 पीसी जिम्बल कैमरा डिवाइस, स्क्रू, कॉपर सिलेंडर, डंपिंग बॉल्स, 1 पीसी यूएसबी से टीटीएल केबल / फोम कुशन के साथ उच्च गुणवत्ता वाले प्लास्टिक बॉक्स |
| गिनीकृमि | 3352 ग्राम |
| पैकेज माप. | 350*300*250मिमी |
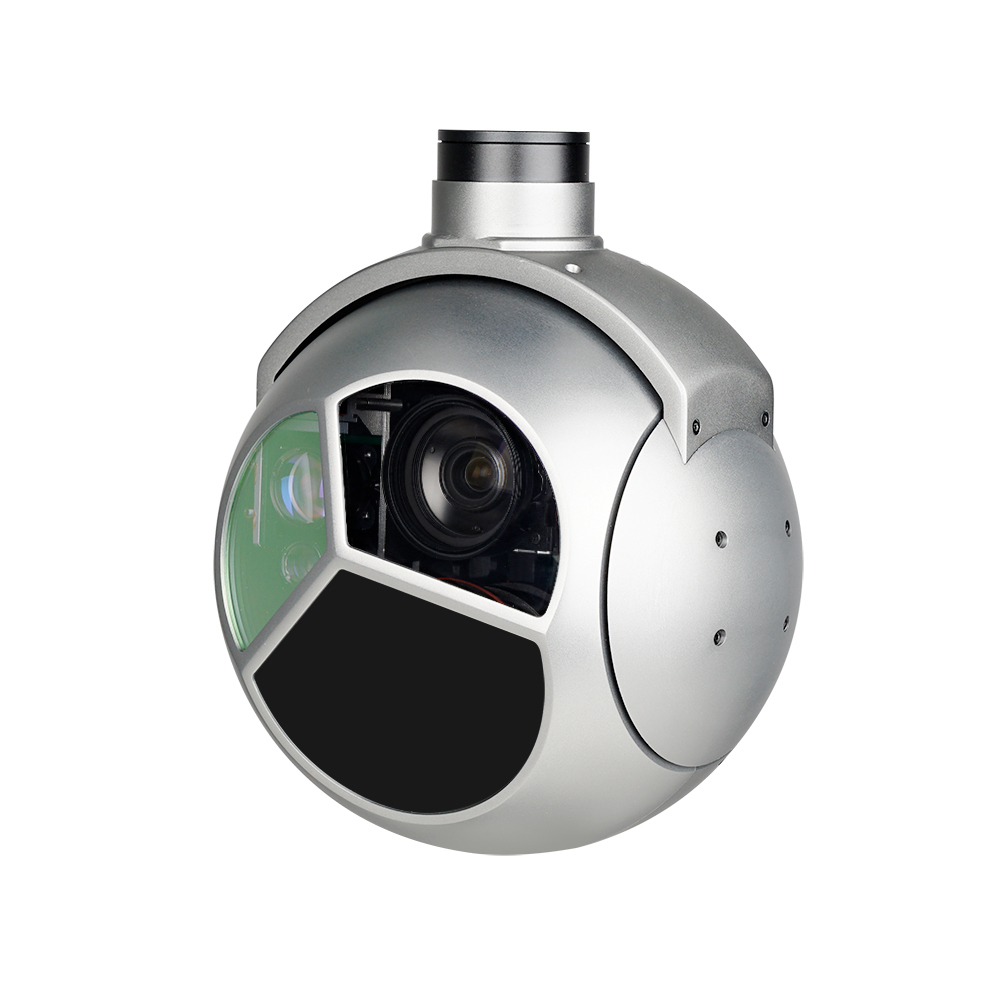
अधिक जानकारी के लिए, कृपया U30TIRM-HD हाई डेफ़िनेशन 1280 lR थर्मल 30x ऑप्टिकल ज़ूम स्टारलाईट नाइट विज़न ट्रिपल सेंसर ऑब्जेक्ट ट्रैकिंग और 5000m LRF जिम्बल कैमरा पर जाएँ
-
उत्पाद परिचय
-
विनिर्देश
U30TIRM-HD विशिष्टता
| हार्डवेयर पैरामीटर | |
| कार्यशील वोल्टेज | 16 वी |
| इनपुट वोल्टेज | 4एस ~ 6एस (14.8वी~25.2वी) |
| आउटपुट वोल्टेज | 5V (PWM से कनेक्ट करें) |
| गतिशील धारा | 850~1500mA @16V |
| बिजली की खपत | औसत 13.6W, अधिकतम 24W |
| कार्य वातावरण का तापमान | -20℃ ~ +50℃ |
| आउटपुट (वैकल्पिक) | आईपी (RTSP/UDP 720p/1080p 25fps/30fps H264/H265) / SDI (1080P 30fps) |
| स्थानीय भंडारण | TF कार्ड (512G तक, क्लास 10, FAT32 प्रारूप) |
| TF कार्ड में चित्र संग्रहण प्रारूप | जेपीजी(1920*1080) |
| TF कार्ड में वीडियो संग्रहण प्रारूप | एमपी4(1080पी 30एफपीएस) |
| नियंत्रण विधि | पीडब्लूएम / टीटीएल / एस.बस / टीसीपी / यूडीपी |
| जिम्बल स्पेक | |
| मैकेनिकल रेंज | पिच/टिल्ट: -45°~135°, यॉ/पैन: ±360°*N |
| नियंत्रण योग्य रेंज | पिच/टिल्ट: -40°~130°, यॉ/पैन: ±360°*N |
| कंपन कोण | पिच/रोल/यॉ: ±0.02° |
| केंद्र तक पहुंचने के लिए एक कुंजी | √ |
| ईओ कैमरा विनिर्देश | |
| इमेजर सेंसर | 1/2.8 प्रकार STARVIS2 CMOS सेंसर |
| चित्र की गुणवत्ता | पूर्ण HD 1080 (1920*1080) |
| प्रभावी पिक्सेल | 2.13एमपी |
| लेंस ऑप्टिकल ज़ूम | 30x, एफ=4.3~129मिमी |
| डिजिटल ज़ूम | 12x (ऑप्टिकल ज़ूम के साथ 360x) |
| न्यूनतम वस्तु दूरी | 10 मिमी (चौड़ा छोर) से 1200 मिमी (टेली छोर) |
| क्षैतिज दृश्य कोण | 64.0°(चौड़ा छोर) ~ 2.4°(टेली छोर) |
| एस/एन अनुपात | 50dB से अधिक |
| न्यूनतम रोशनी | रंग 0.009 लक्स (1/30 सेकंड, 50%, उच्च संवेदनशीलता मोड चालू) |
| रंग 0.09 लक्स (1/30 सेकंड, 50%, उच्च संवेदनशीलता मोड बंद) | |
| एक्सपोज़र नियंत्रण | ऑटो, मैनुअल, प्राथमिकता मोड (शटर प्राथमिकता और आईरिस प्राथमिकता), ईवी मुआवजा, धीमा एई |
| पाना | ऑटो/मैनुअल 0dB से 50.0dB (0 से 28 चरण) अधिकतम लाभ सीमा 10.7 dB से 50.0dB (6 से 28 चरण) |
| श्वेत संतुलन | ऑटो, ATW, इनडोर, आउटडोर, वन पुश WB, मैनुअल WB, आउटडोर ऑटो, सोडियम वाष्प लैंप |
| शटर गति | 1/1s से 1/10,000s, 22 कदम |
| बैक लाइट क्षतिपूर्ति | बंद |
| शोर में कमी | बंद |
| छवि स्थिरीकरण | बंद |
| कोहरा हटाना | बंद |
| आईआर थर्मल इमेजर विशिष्टता | |
| फोकस लंबाई | 50 मिमी |
| क्षैतिज FOV | 17.5° |
| ऊर्ध्वाधर FOV | 14.0° |
| जासूसी दूरी (पुरुष: 1.8x0.5 मीटर) | 2083 मीटर |
| दूरी पहचानें (पुरुष: 1.8x0.5 मीटर) | 521 मीटर |
| सत्यापित दूरी (पुरुष: 1.8x0.5 मीटर) | 260 मीटर |
| जासूसी दूरी (कार: 4.2x1.8 मीटर) | 6389 मीटर |
| दूरी पहचानें (कार: 4.2x1.8 मीटर) | 1597 मीटर |
| सत्यापित दूरी (कार: 4.2x1.8मी) | 799 मीटर |
| कार्य मोड | अनकूल्ड दीर्घ तरंग (8μm~14μm) थर्मल इमेजर |
| डिटेक्टर पिक्सेल | 1280*1024 |
| पिक्सेल पिच | 12μm |
| ध्यान केन्द्रित करने की विधि | एथर्मल प्राइम लेंस |
| एनईटीडी | ≤40mK@25℃,F #1.0 |
| एमआरटीडी | ≤400mK@25℃,F #1.0 |
| शटर | बिस्टेबल शटर |
| रंगो की पटिया | सफेद, काला, छद्म रंग |
| डिजिटल ज़ूम | 1x ~ 4x |
| थर्मोमेट्री प्रकार | समर्थित नहीं |
| ईओ / आईआर कैमरा ऑब्जेक्ट ट्रैकिंग | |
| विचलन पिक्सेल की दर अद्यतन करें | 50हर्ट्ज |
| विचलन पिक्सेल का आउटपुट विलंब | 5एमएस |
| न्यूनतम ऑब्जेक्ट कंट्रास्ट | 5% |
| सीनियर | 4 |
| न्यूनतम ऑब्जेक्ट आकार | 32*32 पिक्सेल |
| अधिकतम ऑब्जेक्ट आकार | 128*128 पिक्सेल |
| ट्रैकिंग गति | ±48 पिक्सेल/फ़्रेम |
| ऑब्जेक्ट मेमोरी समय | 100 फ्रेम (4s) |
वस्तु की स्थिति में पल्स शोर का माध्य वर्गमूल मान |
< 0.5 पिक्सेल |
| आईआर लेजर रेंजफाइंडर | |
| मापने की क्षमता | बड़े लक्ष्य के लिए ≥5 किमी (जैसे इमारत) कार के लिए ≥3 किमी (2.3 मीटर × 2.3 मीटर) लोगों के लिए ≥1.5 किमी (1.75 मीटर × 0.75 मीटर) (विशिष्ट मूल्य के आधार पर: एलओएस दृश्यता: ≥8 किमी विसरित प्रतिबिंब दर: ≥0.3 आर्द्रता: ≤80%) |
| सटीकता (विशिष्ट मान) | ≤ ±1मी (आरएमएस) |
| तरंग लंबाई | 1535nm पल्स लेजर |
| अपसारी कोण | ≤ 0.5एमआरएडी |
| माप आवृत्ति | 1~10हर्ट्ज |
| न्यूनतम माप सीमा | ≤20मी |
| स्थान समाधान | लक्ष्य का अक्षांश और देशांतर |
| रानेफाइंडर | स्क्रीन के केंद्र में स्थित वस्तु और लेजर रेंजफाइंडर के बीच की दूरी मापें |
| विशेषताएँ | |
| ओएसडी | जिम्बल का यॉ और पिच कोण, आवर्धन, रेंजिंग मान, कार्ड रिकॉर्डिंग अवधि, विमान GPS और ऊंचाई या लक्ष्य रेंजिंग बिंदु GPS और ऊंचाई (उनमें से एक चुनें, और t t i i t GPS d ltit d ) d t d ti प्रदर्शित करें |
| जियोटैगिंग | डेयर्सगपेला एटीएनआई एनपीडीओ पीएस सीओ रंडीन ट्यूइन आईसीटी आर एक्सएनआईएफ मी |
| ऑनलाइन कार्ड रीडिंग | SMB चित्र या वीडियो पढ़ें / HTTP चित्र या वीडियो पढ़ें |
| केएलवी (यूडीपी) | कार्ड रिकॉर्डिंग या व्यूलिंक वीडियो प्लेबैक |
| अर्दुपायलट / PX4 | समर्थन (Mavlink प्रोटोकॉल) वैकल्पिक: Ardupilot फ़ॉलो मी सुविधा का समर्थन करें |
| वीडियो सिलाई | ईओ+आईआर /आईआर+ईओ /ईओ /आईआर |
| दोहरी वीडियो स्ट्रीम आउटपुट | समर्थन नहीं (ईओ और आईआर दो स्ट्रीम आउटपुट) |
| पैकिंग जानकारी | |
| उत्तरपश्चिम | 1625±10g(व्यूपोर्ट के साथ व्यूपोर्ट संस्करण) |
| उत्पाद माप. | 155*143.5*232.1मिमी / 155*143.5*237.8मिमी (व्यूपोर्ट के साथ व्यूपोर्ट संस्करण) |
| सामान | 1 पीसी जिम्बल कैमरा डिवाइस, स्क्रू, कॉपर सिलेंडर, डंपिंग बॉल्स, 1 पीसी यूएसबी से टीटीएल केबल / फोम कुशन के साथ उच्च गुणवत्ता वाले प्लास्टिक बॉक्स |
| गिनीकृमि | 3352 ग्राम |
| पैकेज माप. | 350*300*250मिमी |
अधिक जानकारी के लिए, कृपया U30TIRM-HD हाई डेफ़िनेशन 1280 lR थर्मल 30x ऑप्टिकल ज़ूम स्टारलाईट नाइट विज़न ट्रिपल सेंसर ऑब्जेक्ट ट्रैकिंग और 5000m LRF जिम्बल कैमरा पर जाएँ