









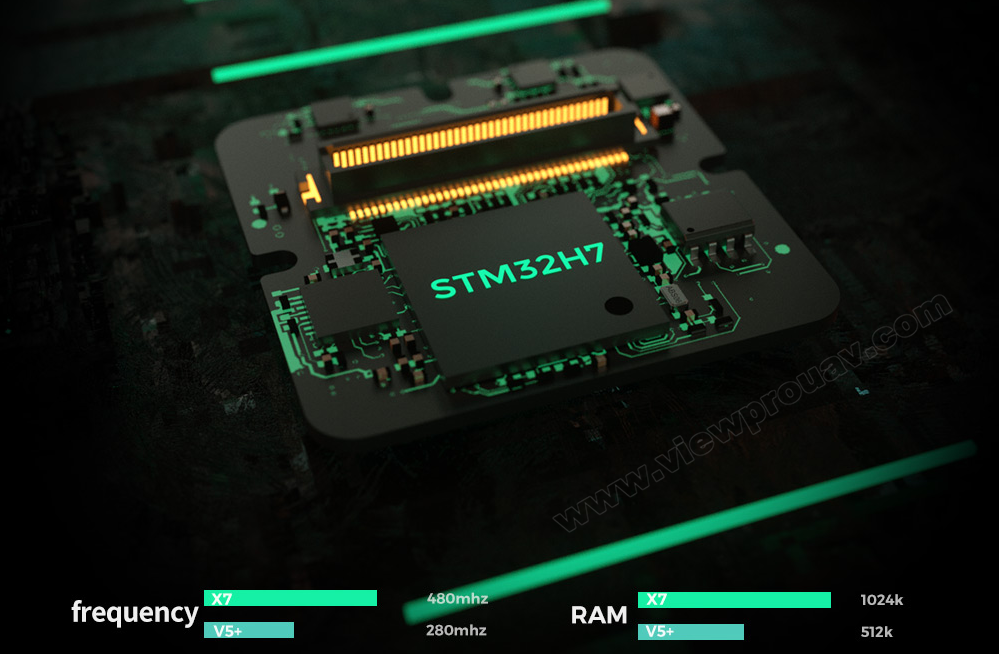
Mais rápido do que nunca
O piloto automático da série X7 usa processadores da série STM32H7, a frequência operacional da CPU aumentou para 480 MHz, armazenamento de 1024 K, FLASH 2048 K, tem um processador mais rápido e armazenamento maior e usa EEPROM de 512 K, pode expandir pontos de passagem para 2048, trazendo mais imaginação para aplicações de voo
Adapte-se a ambientes hostis
O piloto automático da série x7 adota um grande número de chips de nível de carro e possui um sistema de compensação de temperatura de sensor de alta precisão integrado, o que faz com que o sensor funcione em uma temperatura constante para garantir que o sensor possa operar com alta precisão e alta sensibilidade em ambientes de alta e baixa temperatura.
Sempre estável
São usados sensores da série Invensense + Bosch + ADI+ TE, que têm menor ruído e desempenho antichoque e vibração mais forte. Com a bússola de nível industrial RM3100, a estabilidade de voo e o desempenho antiinterferência trouxeram uma melhoria qualitativa

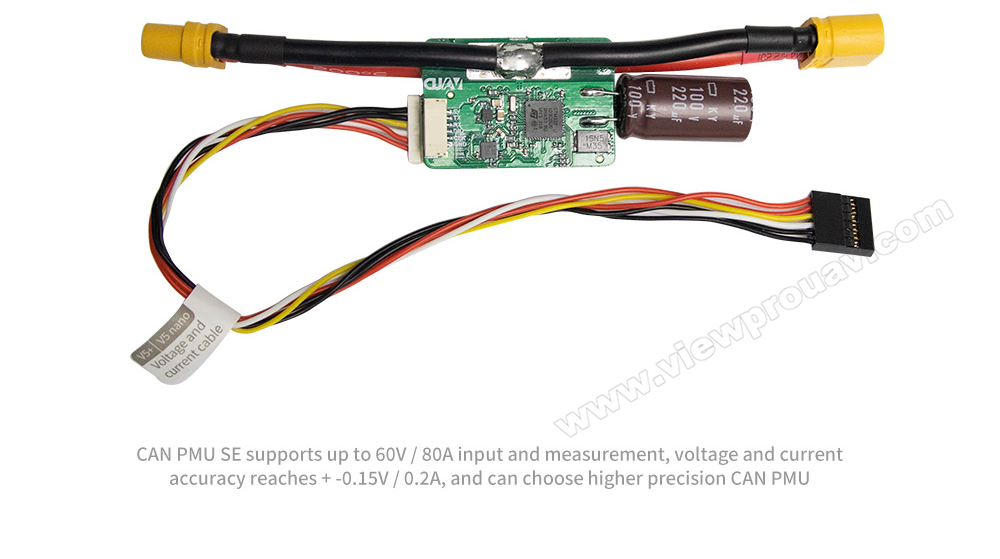
Lista de embalagem padrão com módulo de energia digital
A lista de embalagem padrão inclui o módulo de detecção de energia digital PMU-SE do protocolo UAVCAN, o algoritmo ITT desenvolvido pela CUAV integrado, que ajuda a medir com precisão a tensão e a corrente do UAV em tempo real e torna a estimativa do tempo de voo mais confiável.
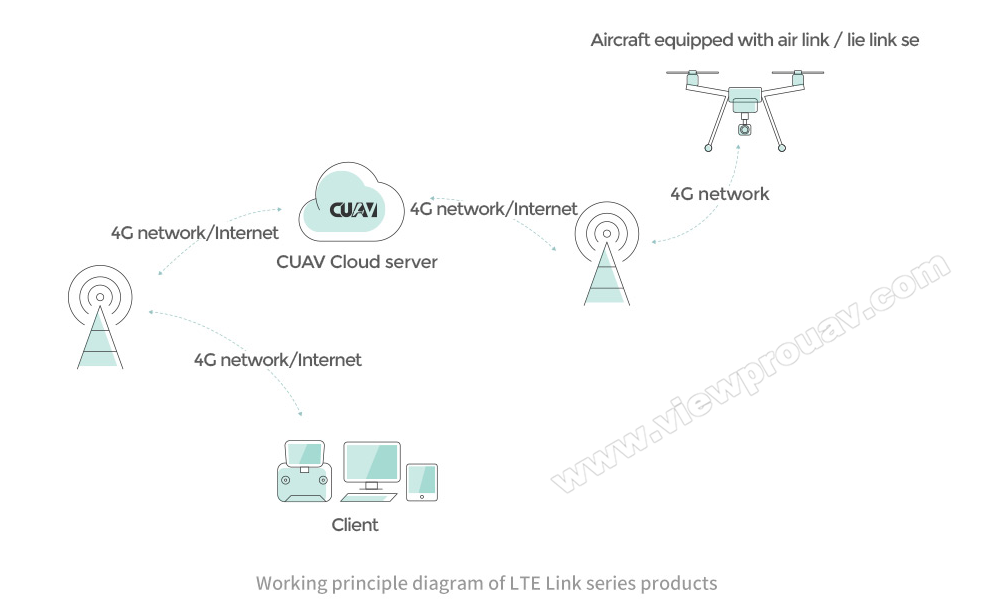
Opcional: Hardware de acesso à nuvem CUAV LTE Link
Todas as séries CUAV de piloto automático suportam a série LTE Link de links de comunicação da plataforma de nuvem Lei Xun. Eles se comunicam por meio de redes 4G e 5G, controlam sem distância, suportam transmissão de vídeo de alta definição em tempo real e compartilhamento de vídeo, e suportam alocação de permissão e funções de gerenciamento de equipe de drones.
Protocolo UAVCAN
Protocolo padrão UAVCAN, alto
anti-interferência forte em tempo real
Barômetro de alta precisão integrado
Barômetro de alta precisão integrado para atender às necessidades de diferentes cenários de aplicação

O NEO V2 Pro adota o design de filtragem dupla SAW +LNA +SAW, que evita efetivamente a influência do controle remoto, transmissão digital e sinais 4G na recepção de posicionamento GPS.

Programa de código aberto, suporta programas personalizados