
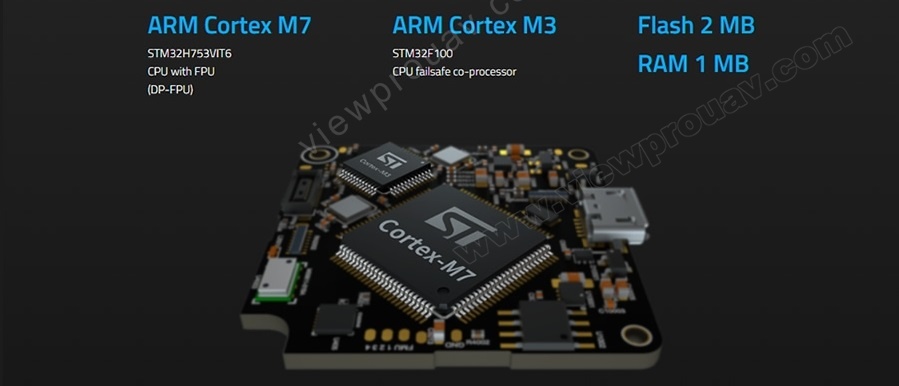
Equipado com processador H7 de alto desempenho
O H7 tem FPU de precisão dupla (DP), 1 MB de RAM e processador de CPU de 40 OMHz, proporcionando alto desempenho, operação extremamente rápida e solução estável para voo.
Consciência Situacional por ADS-B Integrado
Um receptor ADS-B personalizado de 1090 MHz da uAvionix foi integrado à nova placa de transporte ADS-B. Isso fornece uma nova função sem incremento de tamanho. Os UAVs equipados com a nova placa de transporte podem receber atitude de aeronaves comerciais tripuladas dentro do alcance do ADS-B. Isso informa efetivamente o operador do UAS para permitir que eles avaliem os riscos em sua operação atual.

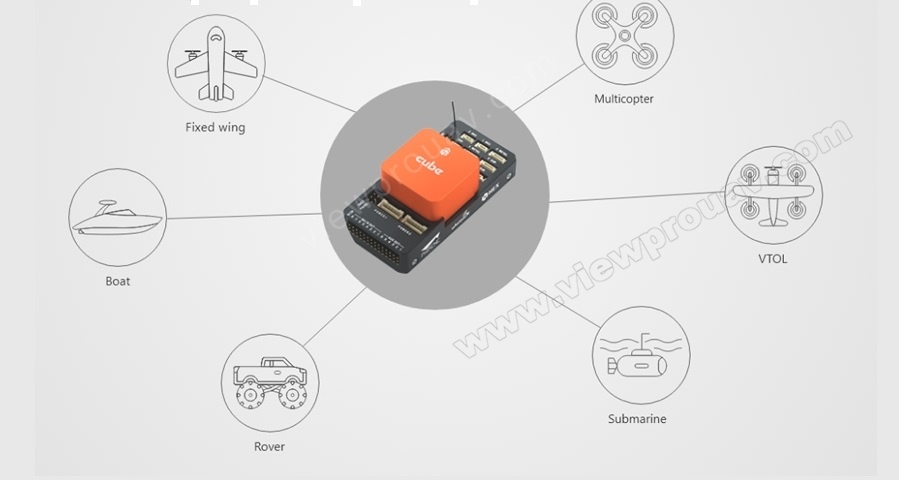
Suporte para vários tipos de veículos
Incluindo helicóptero, qnulticopter, asa fixa, VTOL, Rover, barco, submarino, etc.
Sistema IMU triplo redundante
Equipado com sensores atualizados, proporcionando um sistema mais confiável e seguro.

Fácil troca de tensão do sinal de saída PWM
A saída PWM suporta a comutação entre níveis de sinal de 3,3 V e 5 V. A comutação de voltagem pode ser feita pelo software da estação de controle de solo. Isso melhora a compatibilidade com vários periféricos externos.