









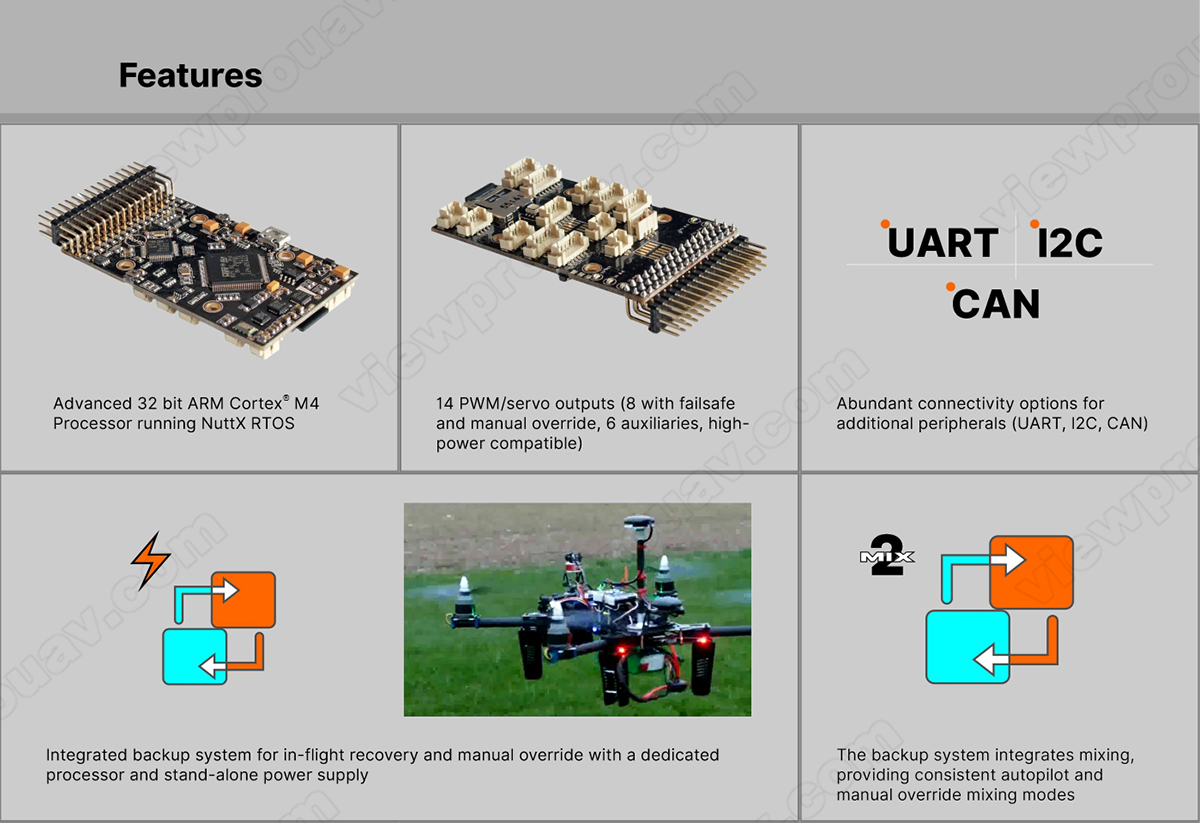
O PX4 2.4.8 foi lançado recentemente pelo famoso fabricante de hardware de controle de voo de código aberto, que é uma nova geração de sistema de controle de voo. Ele adota um processador ARM de 32 bits de alto desempenho, e todo o hardware é de código aberto, e os chips e sensores usados são divulgados. Todos os barramentos e periféricos são exportados, não apenas compatíveis com outros periféricos, mas também mais convenientes para usuários com fortes capacidades de desenvolvimento. O controle de voo possui processadores duplos integrados, um dos quais é um poderoso stm32f427cortex de 32 bits, processador M4 core 168MHz/256KB RAM/2MB Flash; o outro é um coprocessador para uso industrial: STM32F103 de 32 bits, que funciona de forma estável e garante uma operação segura.








Introdução ao produto
Especificação
Especificação do controlador de voo de código aberto do piloto automático PX4 2.4.8
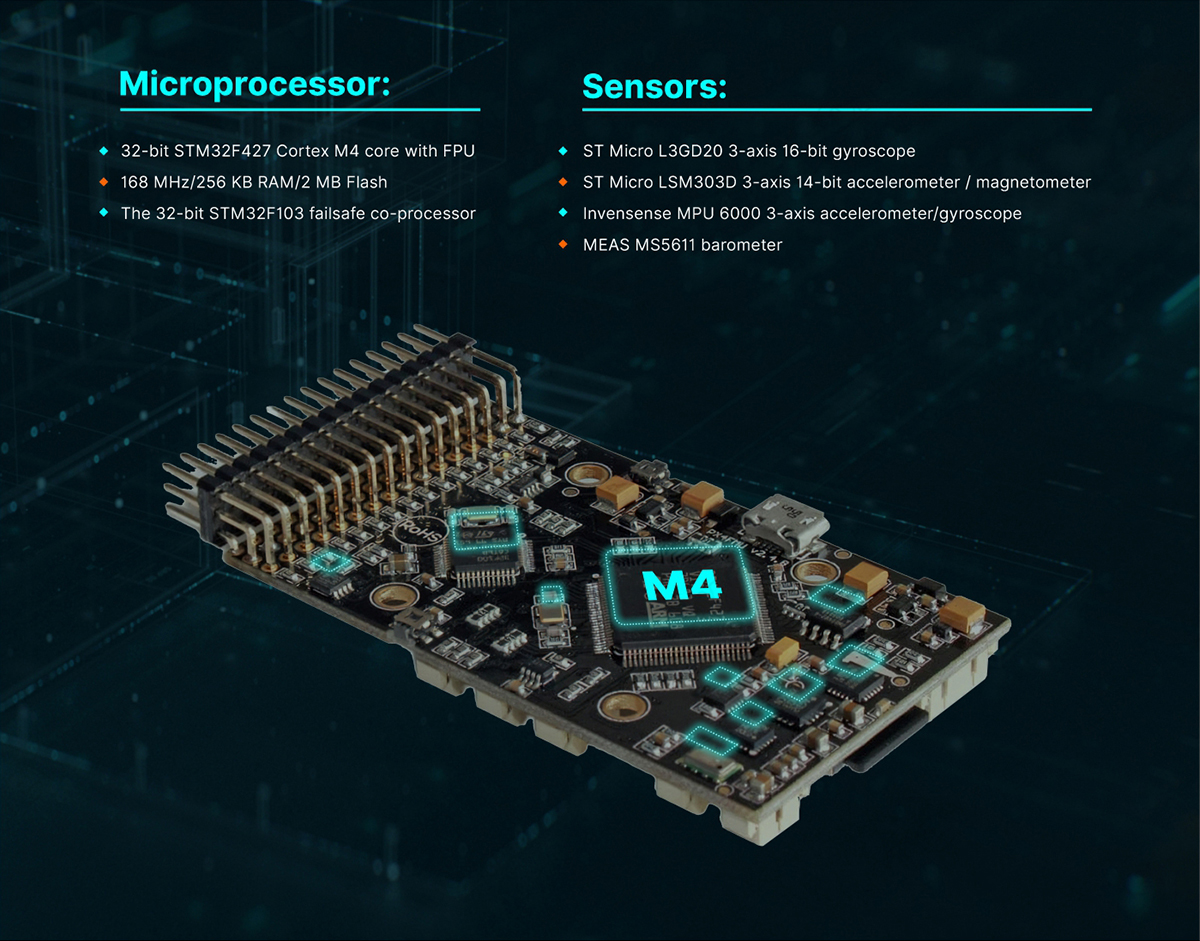
Microprocessador:
- Núcleo Cortex M4 STM32F427 de 32 bits com FPU
- 168 MHz / 256 KB de RAM / 2 MB de Flash
- Coprocessador à prova de falhas STM32F103 de 32 bits
Sensores:
- Giroscópio L3GD20 de 3 eixos e 16 bits
- Acelerômetro / magnetômetro LSM303D de 3 eixos e 14 bits
- Acelerômetro / giroscópio de 3 eixos MPU 6000
- 5611 barômetro
Interfaces:
- 5x UART (portas seriais), uma com alta capacidade de potência, 2x com controle de fluxo de HW
- 2x PODE
- Entrada e saída S.BUS
- Sinal de soma PPM
- Entrada RSSI (PWM ou tensão)
- I2C
- SPI
- Entradas ADC de 3,3 e 6,6 V
- Porta micro-USB externa
Sistema de energia:
- Controlador de diodo ideal com failover automático
- Servo rail de alta potência (7 V) e pronto para alta corrente
- Todas as saídas periféricas protegidas contra sobrecorrente, todas as entradas protegidas contra ESD
Peso e dimensões:
Peso: 38g (1,31oz)
Largura: 50 mm (1,96")
Espessura: 15,5 mm (0,61")
Comprimento: 81,5 mm (3,21")
Especificações do GPS
Precisão de velocidade: 0,1 m/s
Altura máxima: 50.000 m
Velocidade máxima: 515 m/s
Aceleração Máxima: 4 G
Taxa de atualização: 10 Hz
Tempo para a primeira correção: Partida a frio: 26s, Partida a quente: 1s
Fonte de alimentação: tensão DC 5V±5%
Diâmetro: 54 mm / 2,126 polegadas
Espessura: 15 mm / 0,59 polegadas
Para mais detalhes, visite o PX4 2.4.8 Autopilot Open Source Flight Controller para desenvolvedores de drones
-
Introdução ao produto
-
Especificação
O PX4 2.4.8 foi lançado recentemente pelo famoso fabricante de hardware de controle de voo de código aberto, que é uma nova geração de sistema de controle de voo. Ele adota um processador ARM de 32 bits de alto desempenho, e todo o hardware é de código aberto, e os chips e sensores usados são divulgados. Todos os barramentos e periféricos são exportados, não apenas compatíveis com outros periféricos, mas também mais convenientes para usuários com fortes capacidades de desenvolvimento. O controle de voo possui processadores duplos integrados, um dos quais é um poderoso stm32f427cortex de 32 bits, processador M4 core 168MHz/256KB RAM/2MB Flash; o outro é um coprocessador para uso industrial: STM32F103 de 32 bits, que funciona de forma estável e garante uma operação segura.
Especificação do controlador de voo de código aberto do piloto automático PX4 2.4.8
Microprocessador:
- Núcleo Cortex M4 STM32F427 de 32 bits com FPU
- 168 MHz / 256 KB de RAM / 2 MB de Flash
- Coprocessador à prova de falhas STM32F103 de 32 bits
Sensores:
- Giroscópio L3GD20 de 3 eixos e 16 bits
- Acelerômetro / magnetômetro LSM303D de 3 eixos e 14 bits
- Acelerômetro / giroscópio de 3 eixos MPU 6000
- 5611 barômetro
Interfaces:
- 5x UART (portas seriais), uma com alta capacidade de potência, 2x com controle de fluxo de HW
- 2x PODE
- Entrada e saída S.BUS
- Sinal de soma PPM
- Entrada RSSI (PWM ou tensão)
- I2C
- SPI
- Entradas ADC de 3,3 e 6,6 V
- Porta micro-USB externa
Sistema de energia:
- Controlador de diodo ideal com failover automático
- Servo rail de alta potência (7 V) e pronto para alta corrente
- Todas as saídas periféricas protegidas contra sobrecorrente, todas as entradas protegidas contra ESD
Peso e dimensões:
Peso: 38g (1,31oz)
Largura: 50 mm (1,96")
Espessura: 15,5 mm (0,61")
Comprimento: 81,5 mm (3,21")
Especificações do GPS
Precisão de velocidade: 0,1 m/s
Altura máxima: 50.000 m
Velocidade máxima: 515 m/s
Aceleração Máxima: 4 G
Taxa de atualização: 10 Hz
Tempo para a primeira correção: Partida a frio: 26s, Partida a quente: 1s
Fonte de alimentação: tensão DC 5V±5%
Diâmetro: 54 mm / 2,126 polegadas
Espessura: 15 mm / 0,59 polegadas
Para mais detalhes, visite o PX4 2.4.8 Autopilot Open Source Flight Controller para desenvolvedores de drones