









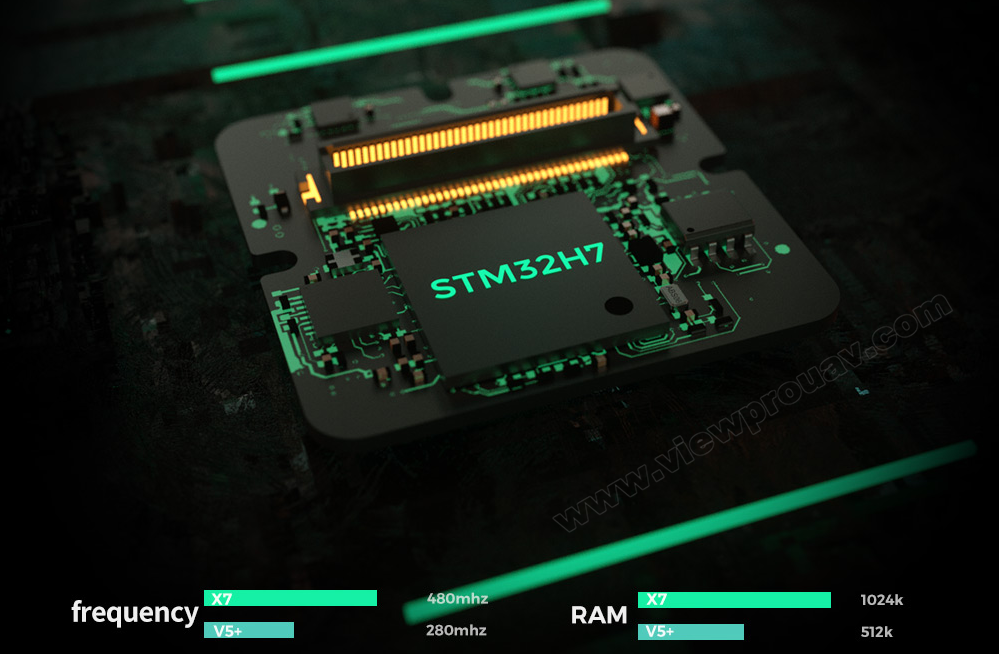
Быстрее, чем когда-либо
Автопилот серии X7 использует процессоры серии STM32H7, рабочая частота ЦП увеличена до 480 МГц, объем памяти 1024 КБ, флэш-память 2048 КБ, имеет более быстрый процессор и большую емкость памяти, а также использует 512 КБ EEPROM, может расширять путевые точки до 2048, привносит больше фантазии в приложения для полета.
Адаптация к суровым условиям окружающей среды
Автопилот серии x7 использует большое количество микросхем автомобильного уровня и имеет встроенную высокоточную систему температурной компенсации датчика, которая обеспечивает работу датчика при постоянной температуре, гарантируя высокую точность и чувствительность датчика в условиях высоких и низких температур.
Всегда стабильный
Используются датчики серии Invensense + Bosch + ADI + TE, которые имеют более низкий уровень шума и более высокие показатели защиты от ударов и вибрации. С промышленным компасом RM3100 стабильность полета и помехоустойчивость принесли качественное улучшение

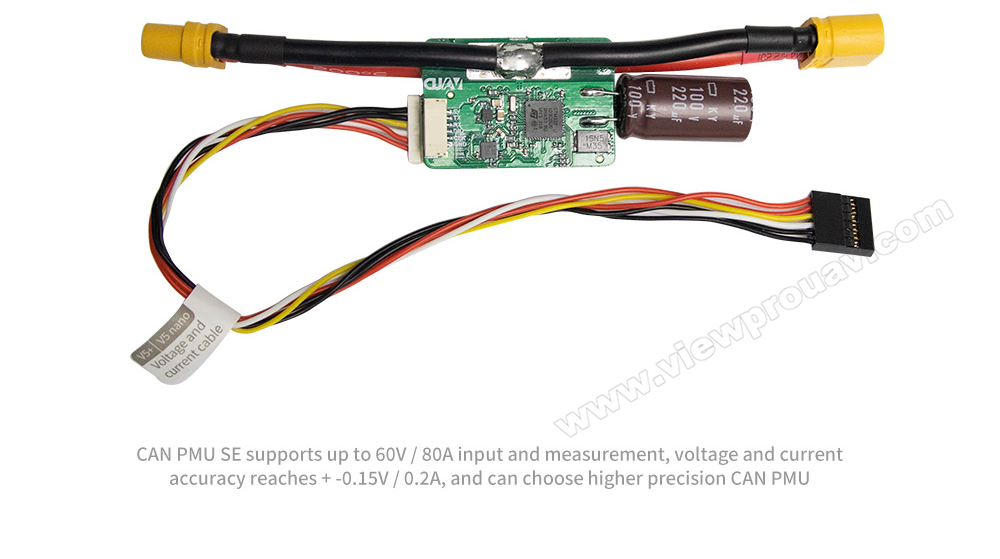
Стандартный упаковочный лист с цифровым модулем питания
В комплект поставки по умолчанию входит цифровой модуль обнаружения мощности PMU-SE с протоколом UAVCAN, встроенный алгоритм ITT собственной разработки CUAV, помогающий точно измерять напряжение и ток БПЛА в реальном времени и повышающий надежность оценки времени полета.
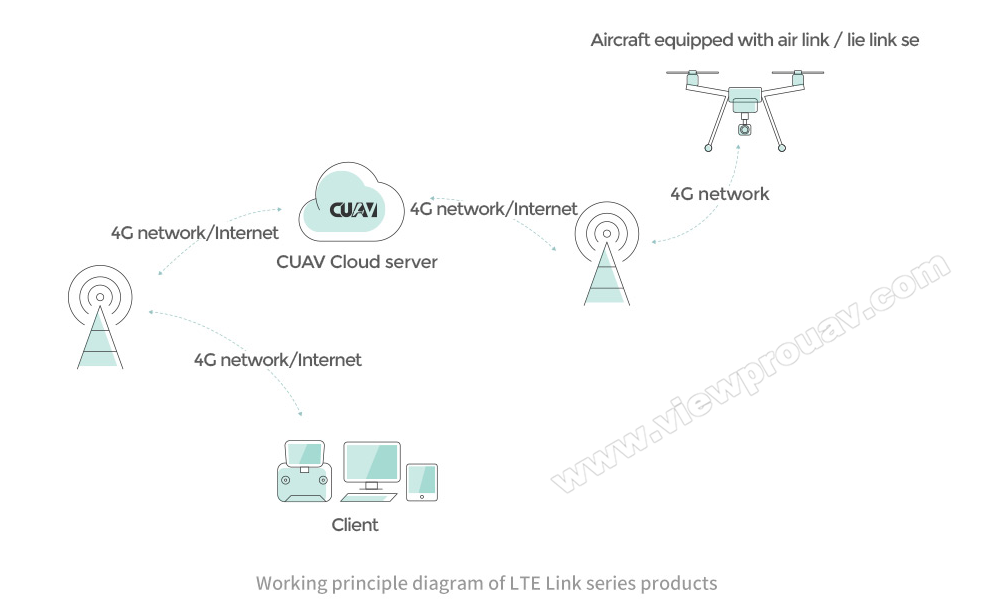
Дополнительно: аппаратное обеспечение для доступа к облаку CUAV LTE Link
Все серии автопилотов CUAV поддерживают серию каналов связи LTE Link облачной платформы Lei Xun. Они взаимодействуют через сети 4G и 5G, управляют без расстояния, поддерживают передачу видео высокой четкости в реальном времени и обмен видео, а также поддерживают функции распределения разрешений и управления командой дронов.
Протокол UAVCAN
Стандартный протокол UAVCAN, высокий
в режиме реального времени, сильная защита от помех
Встроенный высокоточный барометр
Встроенный высокоточный барометр для удовлетворения потребностей различных сценариев применения

В NEO V2 Pro используется конструкция двойной фильтрации SAW + LNA + SAW, которая эффективно устраняет влияние сигналов дистанционного управления, цифровой передачи и 4G на прием GPS-позиционирования.

Программа с открытым исходным кодом, поддерживает пользовательские программы